
Page 114 - 无损检测2024年第八期
P. 114
李 彰,等:
复合型管道焊缝渗透检测机器人系统设计
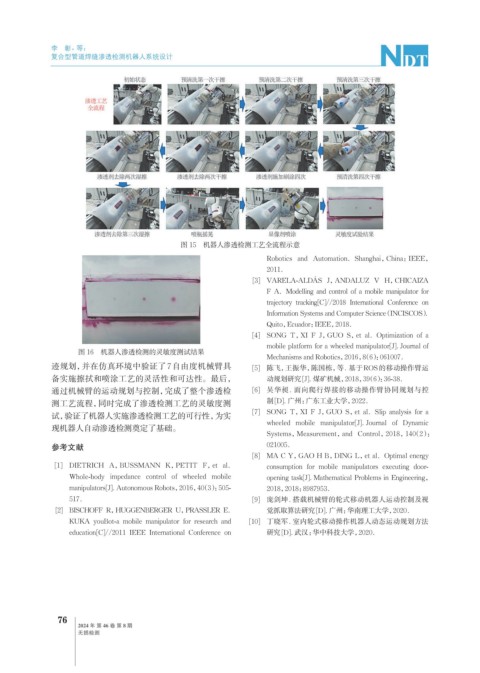
图 15 机器人渗透检测工艺全流程示意
Robotics and Automation.Shanghai,China:IEEE,
2011.
[3] VARELA-ALDÁS J,ANDALUZ V H,CHICAIZA
F A.Modelling and control of a mobile manipulator for
trajectory tracking[C]//2018 International Conference on
Information Systems and Computer Science (INCISCOS).
Quito,Ecuador:IEEE,2018.
[4] SONG T,XI F J,GUO S,et al.Optimization of a
mobile platform for a wheeled manipulator[J]. Journal of
图 16 机器人渗透检测的灵敏度测试结果
Mechanisms and Robotics,2016,8(6):061007.
迹规划,并在仿真环境中验证了7自由度机械臂具 [5] 陈飞,王振华,陈国栋,等. 基于ROS的移动操作臂运
备实施擦拭和喷涂工艺的灵活性和可达性。最后, 动规划研究[J]. 煤矿机械,2018,39(6):36-38.
通过机械臂的运动规划与控制,完成了整个渗透检 [6] 吴华昶. 面向爬行焊接的移动操作臂协同规划与控
测工艺流程,同时完成了渗透检测工艺的灵敏度测 制[D]. 广州:广东工业大学,2022.
试,验证了机器人实施渗透检测工艺的可行性,为实 [7] SONG T,XI F J,GUO S,et al.Slip analysis for a
wheeled mobile manipulator[J]. Journal of Dynamic
现机器人自动渗透检测奠定了基础。
Systems,Measurement,and Control,2018,140(2):
参考文献 021005.
[8] MA C Y,GAO H B,DING L,et al.Optimal energy
[1] DIETRICH A,BUSSMANN K,PETIT F,et al. consumption for mobile manipulators executing door-
Whole-body impedance control of wheeled mobile opening task[J]. Mathematical Problems in Engineering,
manipulators[J]. Autonomous Robots,2016,40(3):505- 2018,2018:8987953.
517. [9] 庞剑坤. 搭载机械臂的轮式移动机器人运动控制及视
[2] BISCHOFF R,HUGGENBERGER U,PRASSLER E. 觉抓取算法研究[D]. 广州:华南理工大学,2020.
KUKA youBot-a mobile manipulator for research and [10] 丁晓军. 室内轮式移动操作机器人动态运动规划方法
education[C]//2011 IEEE International Conference on 研究[D]. 武汉:华中科技大学,2020.
76
2024 年 第 46 卷 第 8 期
无损检测