
Page 109 - 无损检测2024年第八期
P. 109
李 彰,等:
复合型管道焊缝渗透检测机器人系统设计
和新松的HSCR5等,除此之外,国内外许多研究者 型和接触型两类,主要的设计思路如下。
在复合机器人的动力学、协同控制、动态规划、导航 (1)复合工具布置:喷涂工具与擦拭工具根据
避障等方面开展了研究 [4-10] 。但是由于核工业本身 运动仿真的可达性要求采用错位布置,通过机械臂
的安全性要求,复合机器人在核工业领域仍处于研 整体的灵活性完成两种工具的转换。
究探索和应用落地的阶段。 (2)工具快换方式:复合工具中显像剂喷涂工
笔者主要针对核电站管道焊缝的渗透检测工 具仅在显像剂施加这一步操作中使用,通过电磁吸
艺,研制了一套复合型作业机器人,重点描述了机器 附快换的方式将显像剂喷涂工具装载,并通过电气
人的系统设计、工具工装设计、机械臂运动学分析、 快插接头实现电缆走线的模块化快插快拔。
轨迹规划、仿真分析等内容。同时采用该机器人对 (3)擦拭块快换方式:由于渗透工艺中存在非
管道焊缝缺陷进行检测试验,以验证其实施渗透检 常多的擦拭过程,可更换的形式能减轻末端工具的
测工艺的可行性。 设计复杂程度以及减小体积和质量,提高操作便
捷性。
1 机器人总体设计
(4)擦拭块复用方式:擦拭块采用可旋转自锁
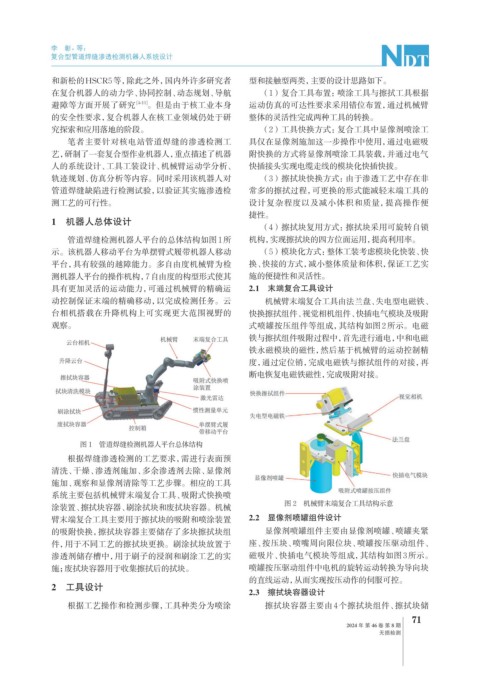
管道焊缝检测机器人平台的总体结构如图1所 机构,实现擦拭块的四方位面运用,提高利用率。
示。该机器人移动平台为单摆臂式履带机器人移动 (5)模块化方式: 整体工装考虑模块化快装、快
平台,具有较强的越障能力。多自由度机械臂为检 换、快接的方式,减小整体质量和体积,保证工艺实
测机器人平台的操作机构,7自由度的构型形式使其 施的便捷性和灵活性。
具有更加灵活的运动能力,可通过机械臂的精确运 2.1 末端复合工具设计
动控制保证末端的精确移动,以完成检测任务。云 机械臂末端复合工具由法兰盘、失电型电磁铁、
台相机搭载在升降机构上可实现更大范围视野的 快换擦拭组件、视觉相机组件、快插电气模块及吸附
观察。 式喷罐按压组件等组成,其结构如图2所示。电磁
铁与擦拭组件吸附过程中,首先进行通电,中和电磁
铁永磁模块的磁性,然后基于机械臂的运动控制精
度,通过定位销,完成电磁铁与擦拭组件的对接,再
断电恢复电磁铁磁性,完成吸附对接。
图 1 管道焊缝检测机器人平台总体结构
根据焊缝渗透检测的工艺要求,需进行表面预
清洗、干燥、渗透剂施加、多余渗透剂去除、显像剂
施加、观察和显像剂清除等工艺步骤。相应的工具
系统主要包括机械臂末端复合工具、吸附式快换喷
涂装置、擦拭块容器、刷涂拭块和废拭块容器。机械 图 2 机械臂末端复合工具结构示意
臂末端复合工具主要用于擦拭块的吸附和喷涂装置 2.2 显像剂喷罐组件设计
的吸附快换,擦拭块容器主要储存了多块擦拭块组 显像剂喷罐组件主要由显像剂喷罐、喷罐夹紧
件,用于不同工艺的擦拭块更换。刷涂拭块放置于 座、按压块、喷嘴周向限位块、喷罐按压驱动组件、
渗透剂储存槽中,用于刷子的浸润和刷涂工艺的实 磁吸片、快插电气模块等组成,其结构如图3所示。
施;废拭块容器用于收集擦拭后的拭块。 喷罐按压驱动组件中电机的旋转运动转换为导向块
的直线运动,从而实现按压动作的伺服可控。
2 工具设计
2.3 擦拭块容器设计
根据工艺操作和检测步骤,工具种类分为喷涂 擦拭块容器主要由4个擦拭块组件、擦拭块储
71
2024 年 第 46 卷 第 8 期
无损检测