
Page 112 - 无损检测2024年第八期
P. 112
李 彰,等:
复合型管道焊缝渗透检测机器人系统设计
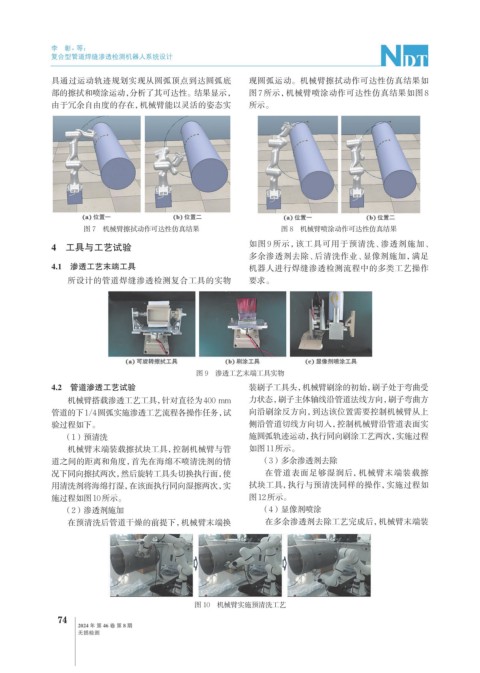
具通过运动轨迹规划实现从圆弧顶点到达圆弧底 现圆弧运动。机械臂擦拭动作可达性仿真结果如
部的擦拭和喷涂运动,分析了其可达性。结果显示, 图 7 所示,机械臂喷涂动作可达性仿真结果如图 8
由于冗余自由度的存在,机械臂能以灵活的姿态实 所示。
图 7 机械臂擦拭动作可达性仿真结果 图 8 机械臂喷涂动作可达性仿真结果
4 工具与工艺试验 如图 9 所示,该工具可用于预清洗、渗透剂施加、
多余渗透剂去除、后清洗作业、显像剂施加,满足
4.1 渗透工艺末端工具 机器人进行焊缝渗透检测流程中的多类工艺操作
所设计的管道焊缝渗透检测复合工具的实物 要求。
图 9 渗透工艺末端工具实物
4.2 管道渗透工艺试验 装刷子工具头,机械臂刷涂的初始,刷子处于弯曲受
机械臂搭载渗透工艺工具,针对直径为400 mm 力状态,刷子主体轴线沿管道法线方向,刷子弯曲方
管道的下1/4圆弧实施渗透工艺流程各操作任务, 试 向沿刷涂反方向,到达该位置需要控制机械臂从上
验过程如下。 侧沿管道切线方向切入,控制机械臂沿管道表面实
(1)预清洗 施圆弧轨迹运动,执行同向刷涂工艺两次,实施过程
机械臂末端装载擦拭块工具,控制机械臂与管 如图11所示。
道之间的距离和角度,首先在海绵不喷清洗剂的情 (3)多余渗透剂去除
况下同向擦拭两次,然后旋转工具头切换执行面,使 在管道表面足够湿润后,机械臂末端装载擦
用清洗剂将海绵打湿,在该面执行同向湿擦两次,实 拭块工具,执行与预清洗同样的操作,实施过程如
施过程如图10所示。 图12所示。
(2)渗透剂施加 (4)显像剂喷涂
在预清洗后管道干燥的前提下,机械臂末端换 在多余渗透剂去除工艺完成后,机械臂末端装
图 10 机械臂实施预清洗工艺
74
2024 年 第 46 卷 第 8 期
无损检测