
Page 110 - 无损检测2024年第八期
P. 110
李 彰,等:
复合型管道焊缝渗透检测机器人系统设计
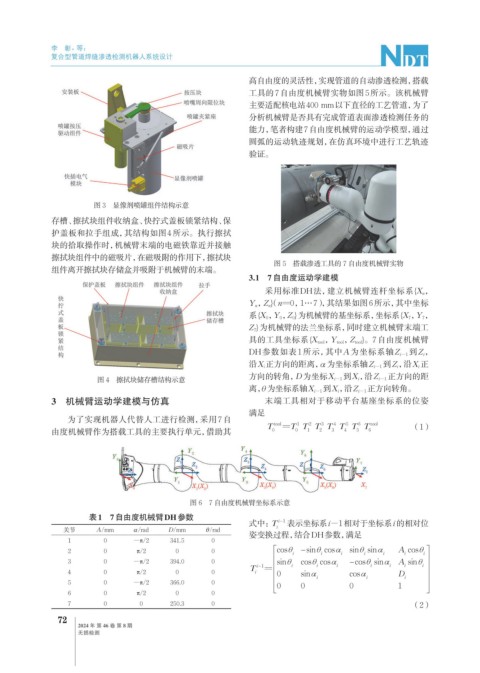
高自由度的灵活性,实现管道的自动渗透检测,搭载
工具的7自由度机械臂实物如图5所示。该机械臂
主要适配核电站400 mm以下直径的工艺管道,为了
分析机械臂是否具有完成管道表面渗透检测任务的
能力,笔者构建7自由度机械臂的运动学模型,通过
圆弧的运动轨迹规划,在仿真环境中进行工艺轨迹
验证。
图 3 显像剂喷罐组件结构示意
存槽、擦拭块组件收纳盒、快拧式盖板锁紧结构、保
护盖板和拉手组成,其结构如图4所示。执行擦拭
块的拾取操作时,机械臂末端的电磁铁靠近并接触
擦拭块组件中的磁吸片,在磁吸附的作用下,擦拭块
图 5 搭载渗透工具的 7 自由度机械臂实物
组件离开擦拭块存储盒并吸附于机械臂的末端。
3.1 7自由度运动学建模
采用标准DH法,建立机械臂连杆坐标系{X n ,
Y n , Z n }(n=0,1…7),其结果如图6所示,其中坐标
系{X 0 , Y 0 , Z 0 }为机械臂的基坐标系,坐标系{X 7 , Y 7 ,
Z 7 }为机械臂的法兰坐标系,同时建立机械臂末端工
具的工具坐标系{X tool , Y tool , Z tool }。7自由度机械臂
DH参数如表 1 所示,其中A为坐标系轴Z i-1 到Z i ,
沿X i 正方向的距离, α 为坐标系轴Z i-1 到Z i ,沿X i 正
方向的转角, D为坐标X i-1 到X i ,沿Z i-1 正方向的距
图 4 擦拭块储存槽结构示意
离, θ 为坐标系轴X i-1 到X i ,沿Z i-1 正方向转角。
3 机械臂运动学建模与仿真 末端工具相对于移动平台基座坐标系的位姿
满足
为了实现机器人代替人工进行检测,采用7自
tool = T 1 T 2 TTT 4 5 T 6 TT tool (1)
3
由度机械臂作为搭载工具的主要执行单元,借助其 0 0 1 2 3 4 5 6
图 6 7 自由度机械臂坐标系示意
表1 7自由度机械臂DH参数
式中:T i− 1 表示坐标系i-1相对于坐标系i的相对位
关节 A/mm α/rad D/mm θ/rad i
姿变换过程,结合DH参数,满足
1 0 -π/2 341.5 0
2 0 π/2 0 0 cos θ i sin θ − i cos α i sin θ i sin α i A i cos θ i
3 0 -π/2 394.0 0 sin θ cos θ cos α cos θ − sin α A sin θ i
T i− 1 = i i i i i i
4 0 π/2 0 0 i 0 sinα cosα D
i i i
5 0 -π/2 366.0 0
0 0 0 1
6 0 π/2 0 0
7 0 0 250.3 0 (2)
72
2024 年 第 46 卷 第 8 期
无损检测