
Page 96 - 无损检测2023年第六期
P. 96
李丹宇:
基于多角度 X 射线投影的叠片电池极片包覆值测量
间的相对位置也不固定, 使得传统 X 射线二维投影
无法准确测量阴极片与阳极片之间的最小距离, 增
大了检测难度 [ 5 ] 。
为了实现叠片电池极片包覆值的测量, 工业上
改进了传统 X 射线投影测量方法。该方法对叠片
电池的4个角进行一定角度的投影, 根据阴阳极片
投影长度的差值可以估算电池阴阳极片错位是否在
合格范围内, 但无法直接得出阴阳极片错位距离( 包
覆值) 及各层相对角度。使用 X 射线投影结合称重 图1 叠片电芯阴阳极片结构示意
法能够检测裸电芯片数是否合格, 但是无法进一步
投影; ④ 再次沿垂直于射线反向平移电池s 2 距离,
识别极片缺陷 [ 6 ] 。对叠片电池进行两次角度互余的 对电池角 D 投影; ⑤ 根据投影图像计算 4 个角对
投影可计算出阴阳极片错位距离( 包覆值), 但对角 应的包覆值。
度控制精度要求非常高 [ 7 ] 。此外, 工业 CT 检测虽
然能够对电池内部全方位成像 [ 8 ] , 但是成本较高, 并
且受到检测速度的限制, 一般不用于自动化全检而
用于抽检。
笔者提出了一种针对叠片电池阴阳极片错位的
X 射线投影检测方法, 该方法能够通过多次投影, 在
不依赖投影角度的情况下精确测量方形叠片电池阴
阳极片间错位的最小值, 并通过试验验证了检测的
准确度。
1 多角度投影几何模型
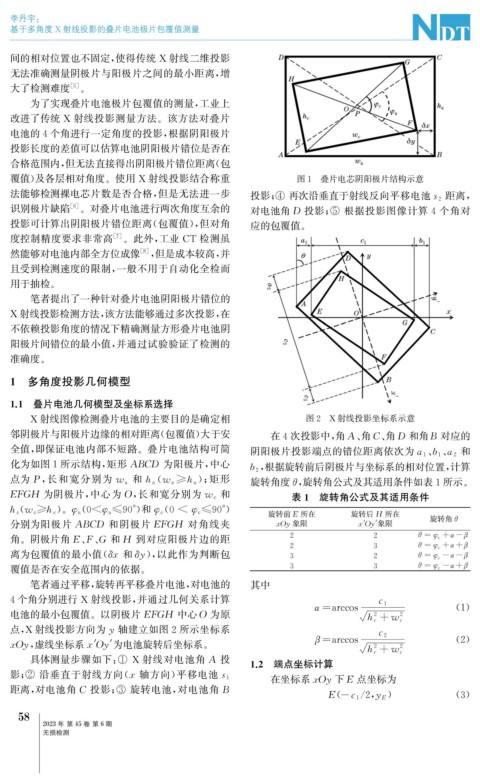
1.1 叠片电池几何模型及坐标系选择
X 射线图像检测叠片电池的主要目的是确定相 图2 X 射线投影坐标系示意
邻阴极片与阳极片边缘的相对距离( 包覆值) 大于安 在4次投影中, 角A 、 角C 、 角D 和角B 对应的
全值, 即保证电池内部不短路。叠片电池结构可简 、 、 和
阴阳极片投影端点的错位距离依次为a 1 b 1 a 2
化为如图1所示结构, 矩形 ABCD 为阳极片, 中心 , 根据旋转前后阴极片与坐标系的相对位置, 计算
b 2
( ); 矩形
点为 P , 长和宽分别为 w a 和 h a w a≥h a 旋转角度 θ , 旋转角公式及其适用条件如表1所示。
和
EFGH 为阴极片, 中心为 O , 长和宽分别为 w c 表1 旋转角公式及其适用条件
(
( )。 φ a 0< φ a≤90° ) 和 (
h c w c≥h c φ c 0< φ c≤90° ) 旋转前E 所在 旋转后 H 所在
分别为阳极片 ABCD 和阴极片EFGH 对角线夹 xO y 象限 x'O y ' 象限 旋转角 θ
角。阴极片角E 、 F 、 G 和 H 到对应阳极片边的距 2 2 θ=φ c + α- β
2 3 θ=φ c + α+ β
离为包覆值的最小值( δx 和 δ y ), 以此作为判断包 3 2 θ=φ c - α- β
覆值是否在安全范围内的依据。 3 3 θ=φ c - α+ β
笔者通过平移, 旋转再平移叠片电池, 对电池的 其中
4个角分别进行 X 射线投影, 并通过几何关系计算 c 1
电池的最小包覆值。以阴极片 EFGH 中心O 为原 α= arccos 2 2 ( 1 )
h c +w c
点, X 射线投影方向为 y 轴建立如图2所示坐标系
c 2 ( 2 )
xO y , 虚线坐标系x'O y ' 为电池旋转后坐标系。 β= arccos 2 2
h c +w c
具体测量步骤如下: ① X 射线对电池角 A 投
1.2 端点坐标计算
影; ② 沿垂直于射线方向( x 轴方向) 平移电池s 1 下E 点坐标为
在坐标系xO y
距离, 对电池角 C 投影; ③ 旋转电池, 对电池角 B
E ( c 1 2 , ) ( 3 )
/
-
y E
8
5
2023年 第45卷 第6期
无损检测