
Page 118 - 无损检测2025年第三期
P. 118
王文强,等:
运载火箭筒体纵缝 DR 检测系统的研制及应用
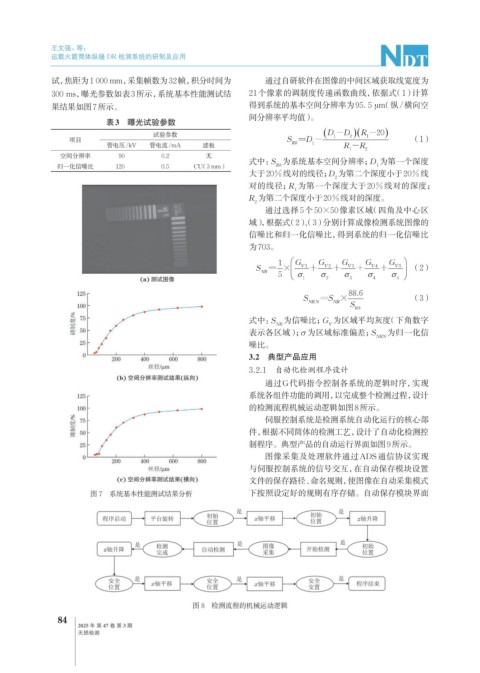
试,焦距为1 000 mm,采集帧数为32帧,积分时间为 通过自研软件在图像的中间区域获取线宽度为
300 ms,曝光参数如表3所示,系统基本性能测试结 21个像素的调制度传递函数曲线,依据式(1)计算
果结果如图7所示。 得到系统的基本空间分辨率为95. 5 μm(纵/横向空
间分辨率平均值)。
表3 曝光试验参数
试验参数
项目 (1)
管电压/kV 管电流/mA 滤板
空间分辨率 90 0.2 无
式中:S 为系统基本空间分辨率;D 为第一个深度
归一化信噪比 120 0.5 CU(3 mm) Rb 1
大于20%线对的线径;D 为第二个深度小于20%线
2
对的线径;R 为第一个深度大于 20%线对的深度;
1
R 为第二个深度小于20%线对的深度。
2
通过选择5个50×50像素区域 (四角及中心区
域),根据式(2)、(3)分别计算成像检测系统图像的
信噪比和归一化信噪比,得到系统的归一化信噪比
为703。
(2)
(3)
式中:S 为信噪比;G 为区域平均灰度(下角数字
NR V
表示各区域); σ 为区域标准偏差;S NRN 为归一化信
噪比。
3.2 典型产品应用
3.2.1 自动化检测程序设计
通过G代码指令控制各系统的逻辑时序,实现
系统各组件功能的调用,以完成整个检测过程,设计
的检测流程机械运动逻辑如图8所示。
伺服控制系统是检测系统自动化运行的核心部
件,根据不同筒体的检测工艺,设计了自动化检测控
制程序。典型产品的自动运行界面如图9所示。
图像采集及处理软件通过ADS通信协议实现
与伺服控制系统的信号交互,在自动保存模块设置
文件的保存路径、命名规则,使图像在自动采集模式
图 7 系统基本性能测试结果分析 下按照设定好的规则有序存储。自动保存模块界面
图 8 检测流程的机械运动逻辑
84
2025 年 第 47 卷 第 3 期
无损检测