
Page 67 - 无损检测2024年第五期
P. 67
邓金涌, 等:
多层复合材料黏接缺陷的声阻法检测
检测方法中的一种, 又称为机械阻抗法。声振检测 表1 3种形式的机械阻抗和导纳
方法主要有敲击检测法和声阻检测法 [ 4 ] , 两者的检 响应类型 位移 速度 加速度
测基本原理几乎一致, 与常规超声检测方法同源异 力 / 响应 位移阻抗 速度阻抗 加速度阻抗
流, 主要差异体现在接收信号及信号处理方面。声 响应 / 力 位移导纳 速度导纳 加速度导纳
阻法的基本原理是在工件中激励出机械波, 该机械 表2 3种理想元件的阻抗和导纳
波在工件中传播会使工件的局部同样发生振动, 而 位移d 速度v 加速度a
元件
有缺陷处与无缺陷处对于同一激励产生的振动响应 阻抗 导纳 阻抗 导纳 阻抗 导纳
阻尼 j ωc 1 / j ωc c 1 / c c / j ω j ω / c
是不同的, 通过振动传感器采集这一振动响应, 即可 弹簧 k 1 / k k / j ω j ω / k -k / ω 2 -ω / k
2
质量块 2 2 1 / j ωm m 1 / m
判断材料中是否存在缺陷。 -ω m -1 / ω m j ωm
文章研究的对象是以不锈钢、 橡胶、 加热组件 一个振动系统通常可以看作由阻尼器、 弹簧和
和玻纤黏接而成的新型多层复合材料。使用该材 质量块3种基本元件组成。因此, 对于一个单自由
料的直升机桨叶在高海拔、 低温度情况下仍能保 度约束的机械振动系统, 其机械阻抗为
持稳定的结构与性能 [ 5 ] 。但是采用常规超声方法 F ( ω )
j
2
(
Z ( ω ) = = k-mω ) cω ( 1 )
j
+ j
检测该种复合材料时, 因其每层厚度极小, 且主要 X ( ω )
j
缺陷类型如脱黏、 分层等都发生在复合材料中的 式中: F ( ω ) 为激振量; X ( ω ) 为振动响应量; -mω 2
j
j
黏接层界面, 界面之间反射回波容易淹没缺陷信 为质量块的位移阻抗; cω 为阻尼器的位移阻抗。
j
号并发生严重的信号混叠 [ 6 ] , 声阻法接收的信号 弹簧元件和质量块可以贮存或释放机械能, 阻
则不存在以上问题。同时由于测得的振动响应信 尼器是耗能元件, 通过阻尼力做负功。材料的机械
号是时域信号, 其中的相位、 幅值可以对应缺陷的 阻抗与本身的几何尺寸、 密度、 弹性等因素有关。在
深度与尺寸, 因此声阻法检测的结果更加准确可 复合材料中, 无缺陷处材料和结构几乎一致, 因此机
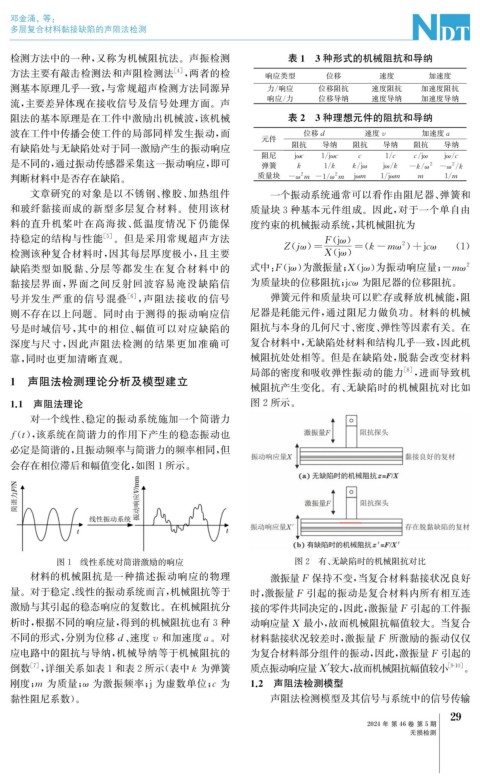
靠, 同时也更加清晰直观。 械阻抗处处相等。但是在缺陷处, 脱黏会改变材料
局部的密度和吸收弹性振动的能力 [ 8 ] , 进而导致机
1 声阻法检测理论分析及模型建立
械阻抗产生变化。有、 无缺陷时的机械阻抗对比如
1.1 声阻法理论 图2所示。
对一个线性、 稳定的振动系统施加一个简谐力
ft 该系统在简谐力的作用下产生的稳态振动也
(),
必定是简谐的, 且振动频率与简谐力的频率相同, 但
会存在相位滞后和幅值变化, 如图1所示。
图1 线性系统对简谐激励的响应 图2 有、 无缺陷时的机械阻抗对比
材料的机械阻抗是一种描述振动响应的物理 激振量F 保持不变, 当复合材料黏接状况良好
量。对于稳定、 线性的振动系统而言, 机械阻抗等于 时, 激振量F 引起的振动是复合材料内所有相互连
激励与其引起的稳态响应的复数比。在机械阻抗分 接的零件共同决定的, 因此, 激振量F 引起的工件振
析时, 根据不同的响应量, 得到的机械阻抗也有3种 动响应量 X 最小, 故而机械阻抗幅值较大。当复合
不同的形式, 分别为位移d 、 速度v 和加速度 a 。对 材料黏接状况较差时, 激振量 F 所激励的振动仅仅
应电路中的阻抗与导纳, 机械导纳等于机械阻抗的 为复合材料部分组件的振动, 因此, 激振量F 引起的
倒数 [ 7 ] , 详细关系如表1和表2所示( 表中k 为弹簧 质点振动响应量X' 较大, 故而机械阻抗幅值较小 [ 9-10 ] 。
刚度; m 为质量; ω 为激振频率;为虚数单位; c 为 1.2 声阻法检测模型
j
黏性阻尼系数)。 声阻法检测模型及其信号与系统中的信号传输
9
2
2024年 第46卷 第5期
无损检测