
Page 129 - 无损检测2021年第七期
P. 129
庞博维, 等:
轮胎胎面磨损检测技术研究进展
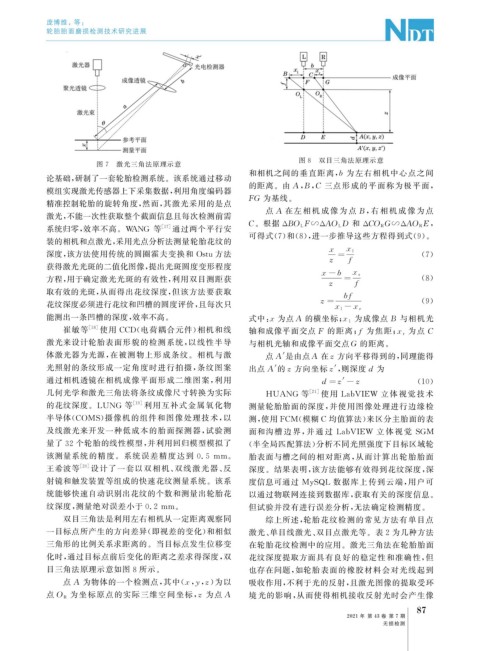
图 8 双目三角法原理示意
图 7 激光三角法原理示意
和相机之间的垂直距离, b 为左右相机中心点之间
论基础, 研制了一套轮胎检测系统。该系统通过移动
的距离。由 A , B , C 三点形成的平面称为极平面,
模组实现激光传感器上下采集数据, 利用角度编码器
FG 为基线。
精准控制轮胎的旋转角度, 然而, 其激光采用的是点
点 A 在左 相 机 成 像 为 点 B , 右 相 机 成 像 为 点
激光, 不能一次性获取整个截面信息且每次检测前需
C 。根据 ΔBO L F∽ΔAO L D 和 ΔCO R G∽ΔAO R E ,
系统归零, 效率不高。 WANG 等 [ 17 ] 通过两个平行安
可得式( 7 ) 和( 8 ), 进一步推导这些方程得到式( 9 )。
装的相机和点激光, 采用光点分析法测量轮胎花纹的
深度, 该方法使用传统的圆圈霍夫变换和 Ostu 方法 x = x l ( 7 )
z f
获得激光光斑的二值化图像, 提出光斑圆度变形程度
方程, 用于确定激光光斑的有效性, 利用双目测距获 x - b x r ( 8 )
=
z f
取有效的光斑, 从而得出花纹深度, 但该方法要获取
b f
花纹深度必须进行花纹和凹槽的圆度评价, 且每次只 z= ( 9 )
x l-x r
能测出一条凹槽的深度, 效率不高。 为成像点 B 与相机光
式中: x 为点A 的横坐标; x 1
崔敏等 [ 18 ] 使用 CCD ( 电荷耦合元件) 相机和线
f
轴和成像平面交点 F 的距离; 为焦距; x r 为点 C
激光来设计轮胎表面形貌的检测系统, 以线性半导 与相机光轴和成像平面交点G 的距离。
体激光器为光源, 在被测物上形成条纹。相机与激 点 A' 是由点A 在 z 方向平移得到的, 同理能得
光照射的条纹形成一定角度时进行拍摄, 条纹图案 出点 A' 的z 方向坐标z' , 则深度d 为
通过相机透镜在相机成像平面形成二维图案, 利用 d = z'-z ( 10 )
几何光学和激光三角法将条纹成像尺寸转换为实际 HUANG 等 [ 21 ] 使用 LabVIEW 立体视觉技术
的花纹深度。 LUNG 等 [ 19 ] 利用互补式金属氧化物 测量轮胎胎面的深度, 并使用图像处理进行边缘检
半导体( COMS ) 摄像机的组件和图像处理技术, 以 测, 使用 FCM ( 模糊 C 均值算法) 来区分主胎面的表
及线激光来开发一种低成本的胎面探测器, 试验测 面和沟槽 边 界, 并 通 过 LabVIEW 立 体 视 觉 SGM
量了 32 个轮胎的线性模型, 并利用回归模型模拟了 ( 半全局匹配算法) 分析不同光照强度下目标区域轮
该测量系统的精度。系统误差精度达到 0.5 mm 。 胎表面与槽之间的相对距离, 从而计算出轮胎胎面
王希波等 [ 20 ] 设计了一套以双相机、 双线激光器、 反 深度。结果表明, 该方法能够有效得到花纹深度, 深
射镜和触发装置等组成的快速花纹测量系统。该系 度信息可通过 M y SQL 数据库上传到云端, 用户可
统能够快速自动识别出花纹的个数和测量出轮胎花 以通过物联网连接到数据库, 获取有关的深度信息。
纹深度, 测量绝对误差小于 0.2mm 。 但试验并没有进行误差分析, 无法确定检测精度。
双目三角法是利用左右相机从一定距离观察同 综上所述, 轮胎花纹检测的常见方法有单目点
一目标点所产生的方向差异( 即视差的变化) 和相似 激光、 单目线激光、 双目点激光等。表 2 为几种方法
三角形的比例关系求距离的。当目标点发生位移变 在轮胎花纹检测中的应用。激光三角法在轮胎胎面
化时, 通过目标点前后变化的距离之差求得深度, 双 花纹深度提取方面具有良好的稳定性和准确性, 但
目三角法原理示意如图 8 所示。 也存在问题, 如轮胎表面的橡胶材料会对光线起到
点 A 为物体的一个检测点, 其中( x , , z ) 为以 吸收作用, 不利于光的反射, 且激光图像的提取受环
y
为坐标原点的实际三维空间坐标, z 为点 A 境 光的影响, 从而使得相机接收反射光时会产生像
点 O R
7
8
2021 年 第 43 卷 第 7 期
无损检测