
Page 124 - 无损检测2021年第七期
P. 124
肖苏华, 等:
基于机器视觉的激光打标智能缺陷检测系统
过传送带传输到检测位置后, 触发相机( 外部触发或
者内部触发) 进行采集图像和缺陷检测, 并将检测结
果传送给相应的执行机构, 如机器人、 线性模组等,
以执行良品或不良品的分拣、 统计等流程。实时检
测流程如图 6 所示。
2 检测结果
将智能缺陷系统运用于 3C 产品激光打标的缺
陷检测中, 系统兼容主流工业相机进行缺陷检测, 可
根据客户实际精度要求进行像素差最小值设置和缺 图 6 产品实时检测流程图
陷 面积最小值设置, 其极限识别精度达到亚像素级 规格产品缺陷检测的共用性。
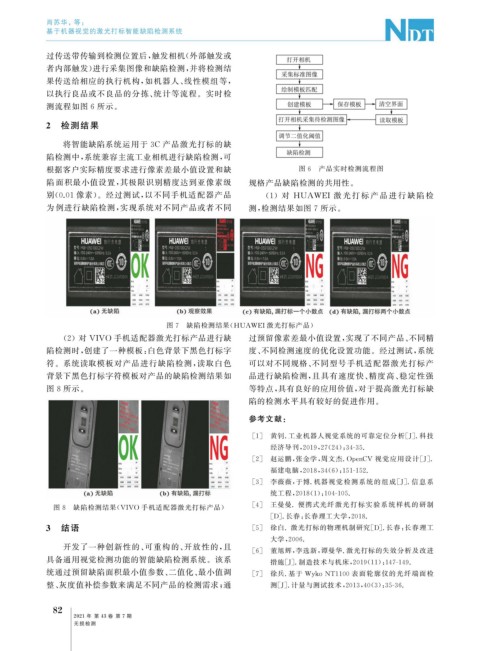
别( 0.01 像素)。经过测试, 以不同手机适配器产品 ( 1 )对 HUAWEI 激 光 打 标 产 品 进 行 缺 陷 检
为 例进行缺陷检测, 实现系统对不同产品或者不同 测, 检测结果如图 7 所示。
图 7 缺陷检测结果( HUAWEI激光打标产品)
( 2 )对 VIVO 手机适配器激光打标产品进行缺 过预留像素差最小值设置, 实现了不同产品、 不同精
陷检测时, 创建了一种模板: 白色背景下黑色打标字 度、 不同检测速度的优化设置功能。经过测试, 系统
符。系统读取模板对产品进行缺陷检测, 读取白色 可以对不同规格、 不同型号手机适配器激光打标产
背景下黑色打标字符模板对产品的缺陷检测结果如 品进行缺陷检测, 且具有速度快、 精度高、 稳定性强
图 8 所示。 等特点, 具有良好的应用价值, 对于提高激光打标缺
陷的检测水平具有较好的促进作用。
参考文献:
[ 1 ] 黄钊 . 工业机器人视觉系统的可靠定位分析[ J ] . 科技
经济导刊, 2019 , 27 ( 24 ): 34-35.
[ 2 ] 赵运鹏, 张金学, 周文杰 .O p enCV 视觉应用设计[ J ] .
福建电脑, 2018 , 34 ( 6 ): 151-152.
[ 3 ] 李薇薇, 于博 . 机器视觉检测系统的组成[ J ] . 信 息 系
统工程, 2018 ( 1 ): 104-105.
[ 4 ] 王曼曼 . 便携式光纤 激 光 打 标 实 验 系 统 样 机 的 研 制
图 8 缺陷检测结果( VIVO 手机适配器激光打标产品)
[ D ] . 长春: 长春理工大学, 2018.
3 结语 [ 5 ] 徐白 . 激光打标的物理机制研究[ D ] . 长春: 长春理工
大学, 2006.
开发了一种创新性的、 可重构的、 开放性的, 且 [ 6 ] 董旭辉, 李选新, 谭曼华 . 激光打标的失效分析及改进
具备通用视觉检测功能的智能缺陷检测系统。该系
措施[ J ] . 制造技术与机床, 2019 ( 11 ): 147-149.
统通过预留缺陷面积最小值参数、 二值化、 最小值调 [ 7 ] 徐兵 . 基于 W y koNT1100 表面轮廓仪的光纤端面检
整、 灰度值补偿参数来满足不同产品的检测需求; 通 测[ J ] . 计量与测试技术, 2013 , 40 ( 3 ): 35-36.
8
2
2021 年 第 43 卷 第 7 期
无损检测