
Page 128 - 无损检测2021年第七期
P. 128
庞博维, 等:
轮胎胎面磨损检测技术研究进展
图 5 基于纹理的感兴趣区域算法流程图
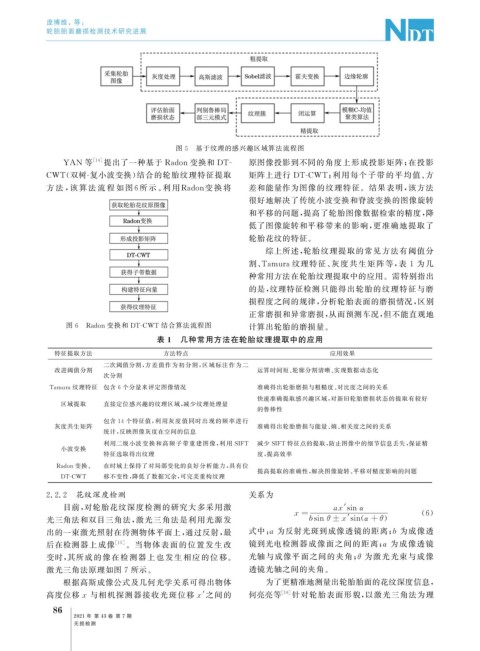
YAN 等 [ 14 ] 提出了一种基于 Radon变换和 DT- 原图像投影到不同的角度上形成投影矩阵; 在投影
CWT ( 双树 - 复小波变换) 结合的轮胎纹理特征提取 矩阵上进行 DT-CWT ; 利用每个子带的平均值、 方
方 法 , 该 算 法 流 程 如 图 6 所 示 。 利 用Radon 变 换 将 差和能量作为图像的纹理特征。结果表明, 该方法
很好地解决了传统小波变换和脊波变换的图像旋转
和平移的问题, 提高了轮胎图像数据检索的精度, 降
低了图像旋转和平移带来的影响, 更准确地提取了
轮胎花纹的特征。
综上所述, 轮胎纹理提取的常见方法有阈值分
割、 Tamura纹理特征、 灰度共生矩阵等, 表 1 为几
种常用方法在轮胎纹理提取中的应用。需特别指出
的是, 纹理特征检测只能得出轮胎的纹理特征与磨
损程度之间的规律, 分析轮胎表面的磨损情况, 区别
正常磨损和异常磨损, 从而预测车况, 但不能直观地
图 6 Radon变换和 DT-CWT 结合算法流程图 计算出轮胎的磨损量。
表 1 几种常用方法在轮胎纹理提取中的应用
特征提取方法 方法特点 应用效果
二次阈值分割, 方差值作为初分割, 区域标注作为二
改进阈值分割 运算时间短、 轮廓分割清晰、 实现数据动态化
次分割
Tamura纹理特征 包含 6 个分量来评定图像情况 准确得出轮胎磨损与粗糙度、 对比度之间的关系
快速准确提取感兴趣区域, 对新旧轮胎磨损状态的提取有较好
区域提取 直接定位感兴趣的纹理区域, 减少纹理处理量
的鲁棒性
包含 14 个特征值, 利用灰度值同时出现的频率进行
灰度共生矩阵 准确得出轮胎磨损与能量、 熵、 相关度之间的关系
统计, 反映图像灰度在空间的信息
利用二级小波变换和高频子带重建图像, 利 用 SIFT 减少 SIFT 特征点的提取, 防止图像中的细节信息丢失, 保证精
小波变换
特征选取得出纹理 度, 提高效率
Radon变换、 在时域上保持了对局部变化的良好分析能力, 具有位
提高提取的准确性, 解决图像旋转、 平移对精度影响的问题
DT-CWT 移不变性, 降低了数据冗余, 可完美重构纹理
2.2.2 花纹深度检测 关系为
目前, 对轮胎花纹深度检测的研究大多采用激 ax'sinα
x = ( 6 )
光三角法和双目三角法, 激光三角法是利用光源发 bsinθ±x'sin ( α+ θ )
出的一束激光照射在待测物体平面上, 通过反射, 最 式中: a 为反射光斑到成像透镜的距离; b 为成像透
后在检测器上成像 [ 15 ] 。当物体表面的位置发生改 镜到光电检测器成像面之间的距离; α 为成像透镜
变时, 其所成的像在检测器上也 发生相应的位移。 光轴与成像平面之间的夹角; θ 为激光光束与成像
激光三角法原理如图 7 所示。 透镜光轴之间的夹角。
根据高斯成像公式及几何光学关系可得出物体 为了更精准地测量出轮胎胎面的花纹深度信息,
高度位移x 与相机探测器接收光斑位移x'之间的 何亮亮等 [ 16 ] 针对轮胎表面形貌, 以激光三角法为理
6
8
2021 年 第 43 卷 第 7 期
无损检测