
Page 114 - 无损检测2021年第五期
P. 114
张丽萍, 等:
气体绝缘开关 X 射线三维成像检测系统的研制及应用
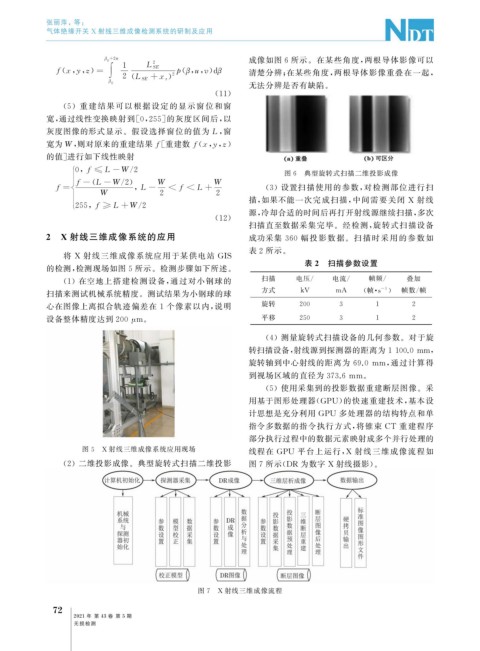
+ 2π 成像如图 6 所示。在某些角度, 两根导体影像可以
β 0
2
1 L SE
(,
y
(
f x , , z ) = 2 p β u , v ) d β 清楚分辨; 在某些角度, 两根导体影像重叠在一起,
)
∫ 2 ( L SE +x r
β 0
无法分辨是否有缺陷。
( 11 )
( 5 )重建结果可以根据设定的显示窗位 和窗
宽, 通过线性变换映射到[ 0 , 255 ] 的灰度区间后, 以
灰度图像的形式显示。假设选择窗位的值为 L , 窗
(
y
宽为 W , 则对原来的重建结果 f 重建数 f x , , z )
[
的值] 进行如下线性映射
0 ,
f ≤L -W / 2 图 6 典型旋转式扫描二维投影成像
f - L -W / 2 ) W W
(
f = , L - <f <L + ( 3 )设置扫描使用的参数, 对检测部位进行扫
W 2 2
描, 如果不能一次完成扫描, 中间需要关闭 X 射线
255 ,
f ≥L +W / 2
源, 冷却合适的时间后再打开射线源继续扫描, 多次
( 12 )
扫描直至数据采集完毕。经检测, 旋转式扫描设备
2 X 射线三维成像系统的应用 成功采集 360 幅投影数据。扫描时采用的参数如
表 2 所示。
将 X 射线三维成像系统应用于某供电站 GIS
表 2 扫描参数设置
的检测, 检测现场如图 5 所示。检测步骤如下所述。
( 1 )在空地上搭建检测设备, 通过对小钢球的 扫描 电压 / 电流 / 帧频 / 叠加
方式 kV mA ( 帧 · s ) 帧数 / 帧
-1
扫描来测试机械系统精度。测试结果为小钢球的球
心在图像上离拟合轨迹偏差在 1 个像素以内, 说明 旋转 200 3 1 2
设备整体精度达到 200 μ m 。 平移 250 3 1 2
( 4 )测量旋转式扫描设备的几何参数。对于旋
转扫描设备, 射线源到探测器的距离为 1100.0mm ,
旋转轴到中心射线的距离为 69.0 mm , 通过计算得
到视场区域的直径为 373.6mm 。
( 5 )使用采集到的投影数据重建断层图像。采
用基于图形处理器( GPU ) 的快速重建技术, 基本设
计思想是充分利用 GPU 多处理器的结构特点和单
指令多数据的指令执行方式, 将锥束 CT 重建程序
部分执行过程中的数据元素映射成多个并行处理的
图 5 X 射线三维成像系统应用现场 线程在 GPU 平台上运行, X 射线三维成像流程如
( 2 )二维投影成像。典型旋转式扫描二维投影 图 7 所示( DR 为数字 X 射线摄影)。
图 7 X 射线三维成像流程
2
7
2021 年 第 43 卷 第 5 期
无损检测