
Page 112 - 无损检测2021年第五期
P. 112
张丽萍, 等:
气体绝缘开关 X 射线三维成像检测系统的研制及应用
素。笔者研发的技术可以得到实际大小的三 维图 机械精度如表 1 所示。
像, 可切片显示, 并区分开重叠的影像, 可用于盆式 表 1 X 射线三维成像系统的机械精度
绝缘子和回路电阻超标的检测, 提高 GIS 运行的可 参数 数值
靠性。实际应用结果表明, 电力设备的 X 射线三维
探测器扭摆角( 理想角度为 0 )/( ° ) <0.01
成像检测是可行的。
探测器俯仰角( 理想角度为 90° )/( ° ) 90±0.5
1 X 射线三维成像系统的研制 最小角度采样间隔 /( ° ) 0.5
旋转角度定位误差 /( ° ) 0.05
1.1 功能精度
旋转过程中整体定位误差 / m <50
μ
待检测 GIS 三视图及模型如图 1 所示, 系统的
图 1 待检测 GIS三视图及模型
1.2 硬件选择
GIS的 X 射线三维成像系统包括机械、 运动控
制、 数据采集、 图 像 重 建、 三 维 图 像 显 示 等 子 系 统。
CT ( 电子计算机断层扫描) 软件系统包括机械控制、
探测器采集、 DR ( 数字射线) 透照成像、 图像重建与显
示 等 4 个 部 分。 采 用 PerkinElmer 公 司 生 产 的
XRD1621型成像板, 分辨率为 2048 像素 ×2048 像
素, 像 素 尺 寸 为 200 μ m , 采 用 SPEKTROFLASH
MRXD300kV 型 定 向 射 线 机 及 控 制 器, 电 流 为
1.0mA~5.0mA , 焦点尺寸( 长 × 宽) 为 2.2 mm×
2.6mm 。相对于扇束 CT , 锥束 CT 采用平板探测
器一次扫描即可完成三维成像, 检测速度更快。
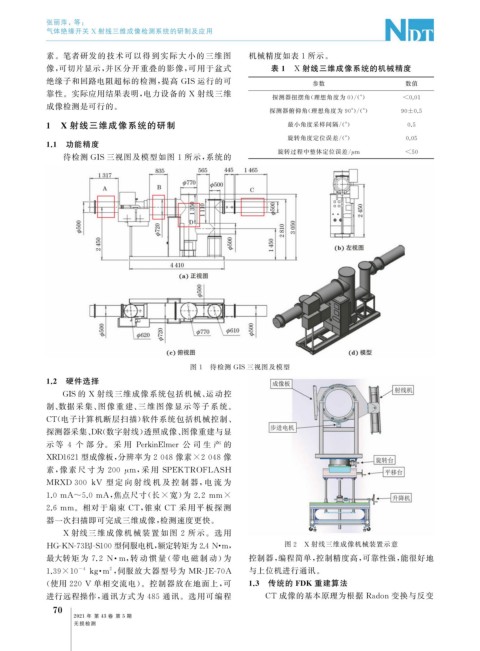
X 射线三维成像机 械 装 置 如 图 2 所 示。选 用
HG-KN-73BJ-S100型伺服电机, 额定转矩为2.N · m , 图 2 X 射线三维成像机械装置示意
4
最大转矩 为 7.2 N · m , 转 动 惯 量 ( 带 电 磁 制 动) 为 控制器, 编程简单, 控制精度高, 可靠性强, 能很好地
-4 2
·
1.39×10 k g m , 伺服放大器型号为 MR-JE-70A 与上位机进行通讯。
( 使用 220V 单相交流电)。控制器放在地面上, 可 1.3 传统的 FDK 重建算法
进行远程操作, 通讯方式为 485 通讯。选用可编程 CT 成像的基本原理为根据 Radon 变换与反变
7
0
2021 年 第 43 卷 第 5 期
无损检测