
Page 113 - 无损检测2021年第五期
P. 113
张丽萍, 等:
气体绝缘开关 X 射线三维成像检测系统的研制及应用
换所表述的二维函数和射线积分之间的变换关系, 投影数据表示为 g β u )( 假设探测器过 O 点,
(,
得到物质的线性衰减系数。 以探测器中心 E 为原点, u 为投影数据坐标), SE 与
( , ), 其 极 坐 标 形 式 为 SO 的夹角记为 。假设虚拟探测器所在坐标轴为
一个二 维 函 数 f x 1 x 2 β 0
~ t , 直线 OS 记为s 轴, 射线源到探测器中心的距离记
f r , θ ), 在平面上沿一条由( , u ) 确定的直线z 的
(
φ
线积分 p 可表示为 [ 12 ] 为L SE , 则射线与虚拟探测器中心线的夹角α 为
u
+∞ +∞ ( 4 )
~ α= β 0 +arctan
(
p = f x 1 x 2 dz= f r , θ ) dz= L SE
( , )
∫
∫
-∞ -∞ 为
射线与t 轴的交点坐标 t 1
+∞
~ 2 2 z t 1 =L SO tanα ( 5 )
∫ u +z , u dz ( 1 )
f
φ +arctan
-∞ 改进的 FDK 算法步骤如下所述。
式( 1 ) 称为 Radon变换, 其反变换如下 ( 1 )以虚拟探测器为参考进行余弦校正。对于
π+∞ 面阵探测器, 以探测器的中心为原点建立直角坐标
~ 1 1 ∂ p
(
f r , θ ) = dud φ 2
()
)
2π ∫ ∫ rcos ( θ- φ -u∂u 系, 过 E 点且与转轴平行的直线记为v 轴, 则校正
2
0-∞
FDK 算法 [ 13 ] ( 由 Feldkam p Davis和 Kress提 公式为
,
出的一种基于圆轨道扫描的近似重建算法) 属于滤 g ' (, u , v ) =
β
波反投影近似解析算法。文章采用射线源探测器偏 g β u , v ) cosαcos [ arctan ( v / L SE +u )]( 6 )
2
2
(,
置圆周扫描图像重建算法。因为成像目标即 3 根铝 式中: (, u , v ) 为在 β 角度下采集到的原始数据;
g β
导体不在中心, 射线源和探测器相对于旋转中心偏 g ' (, u , v ) 为原始数据余弦校正后的结果。
β
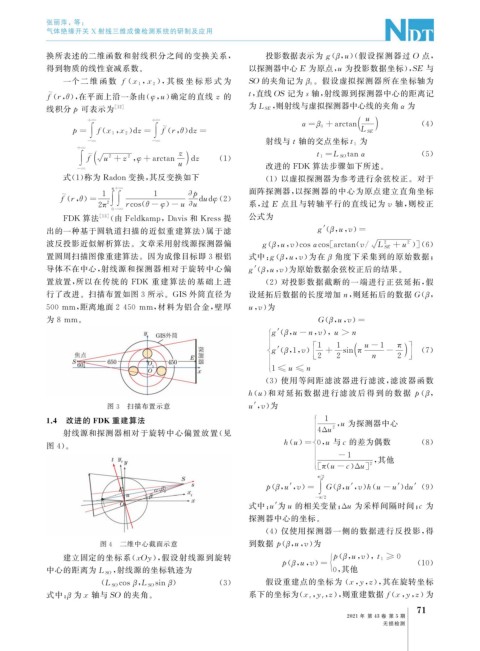
置放置, 所以在传统的 FDK 重建算法的基 础上进 ( 2 )对投影数据截断的一端进行正弦延拓, 假
行了改进。扫描布置如图 3 所示。 GIS 外筒直径为 设延拓后数据的长度增加n , 则延拓后的数据 G (,
β
500mm , 距离地面 2450 mm , 材料为铝合金, 壁厚 u , v ) 为
为 8mm 。 G (, u , v ) =
β
g ' (, u-n , v ), u >n
β
1 1 u-1 π
g ' (, 1 , v )
sinπ
β + 2 - 2 ( 7 )
2 n
1≤u ≤n
( 3 )使用等间距滤波器进行滤波, 滤波器函数
( ,
h ( u ) 和对延拓数据进行滤波后 得 到 的 数 据 p β
图 3 扫描布置示意 u' , v ) 为
1.4 改进的 FDK 重建算法 1 , u 为探测器中心
射线源和探测器相对于旋转中心偏置放置( 见 4Δ u 2
= 0 , u 与 c 的差为偶数 ( 8 )
图 4 )。
-1 , 其他
h ( u )
2
[ π ( u- c ) Δu ]
π / 2
(,
p β u' , v ) = ∫ β
G (, u' , v ) h ( u-u' ) d u' ( 9 )
- π / 2
式中: u' 为u 的相关变量; Δu 为采样间隔时间; c 为
探测器中心的坐标。
( 4 )仅使用探测器一侧的数据进行反投影, 得
图 4 二维中心截面示意 到数据 p β u , v ) 为
(,
(,
建立固定的坐标系( xO y ), 假设射线源到旋转 p β u , v ), t 1 ≥0
p β u , v ) = ( 10 )
(,
0 , 其他
, 射线源的坐标轨迹为
中心的距离为 L SO
y
,
( L SO cos β L SO sin β ) ( 3 ) 假设重建点的坐标为 ( x , , z ), 其在旋转坐标
, ,
式中: 为x 轴与SO 的夹角。 系下的坐标为( x r y r z ), 则重建数据 f x , , z ) 为
y
(
β
1
7
2021 年 第 43 卷 第 5 期
无损检测