
Page 110 - 无损检测2025年第二期
P. 110
王 强,等:
高通过性油气管道的变径检测清管器
制成,在电流型信号发生模块的激励作用下,产生交 体进行浇筑,可使传感器各部件的相对位置完全固定。
变励磁场。TMR磁敏元件是一种基于磁阻原理的传 非接触式变径检测传感器中的阵列TMR磁敏
感器,即电阻随外部磁场强度改变,用于提取空间中 元件获取的空间磁通微弱,包含着大量的无关噪声
的复合磁通信号,并将磁信号转化为电压信号。PCB 信号,不利于管道变形特征的识别。为此,笔者设计
电路板上预留了焊盘位置,起到固定TMR线性传感 了以SGM722为基础的两级放大RC滤波电路, 剔除
器的作用。骨架是激励线圈和磁敏元件的载体。其采 无关频率的噪声信号,提高缺陷响应信号的信噪比。
用3D打印制成,起到固定和限位的作用。对探头整 阵列放大滤波电路如图5(b)所示。
图 5 阵列传感器及阵列放大滤波电路实物
将传感器周向阵列布置,采用电子系统进行数据 3 变径扫查试验
采集、存储、导出,电子系统和里程轮实物如图6所示。
3.1 试验制备
10个阵列布置的传感器获取的管道变径量与两路里程
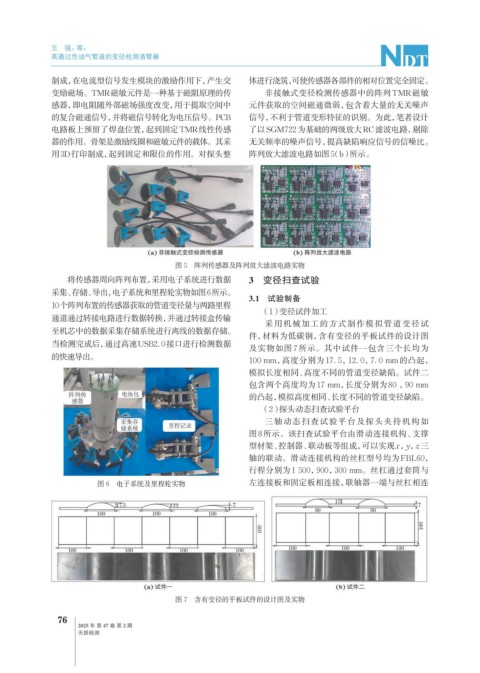
(1)变径试件加工
通道通过转接电路进行数据转换,并通过转接盒传输
采用机械加工的方式制作模拟管道变径试
至机芯中的数据采集存储系统进行离线的数据存储。
件,材料为低碳钢,含有变径的平板试件的设计图
当检测完成后,通过高速USB2. 0接口进行检测数据
及实物如图 7 所示。其中试件一包含三个长均为
的快速导出。 100 mm,高度分别为17. 5,12. 0,7. 0 mm的凸起,
模拟长度相同、高度不同的管道变径缺陷。试件二
包含两个高度均为17 mm,长度分别为80 ,90 mm
的凸起,模拟高度相同、长度不同的管道变径缺陷。
(2)探头动态扫查试验平台
三轴动态扫查试验平台及探头夹持机构如
图8所示。该扫查试验平台由滑动连接机构、支撑
型材架、控制器、联动板等组成,可以实现x, y, z三
轴的联动。滑动连接机构的丝杠型号均为FBL60,
行程分别为1 500,900,300 mm。丝杠通过套筒与
图 6 电子系统及里程轮实物 左连接板和固定板相连接,联轴器一端与丝杠相连
图 7 含有变径的平板试件的设计图及实物
76
2025 年 第 47 卷 第 2 期
无损检测