
Page 109 - 无损检测2025年第二期
P. 109
王 强,等:
高通过性油气管道的变径检测清管器
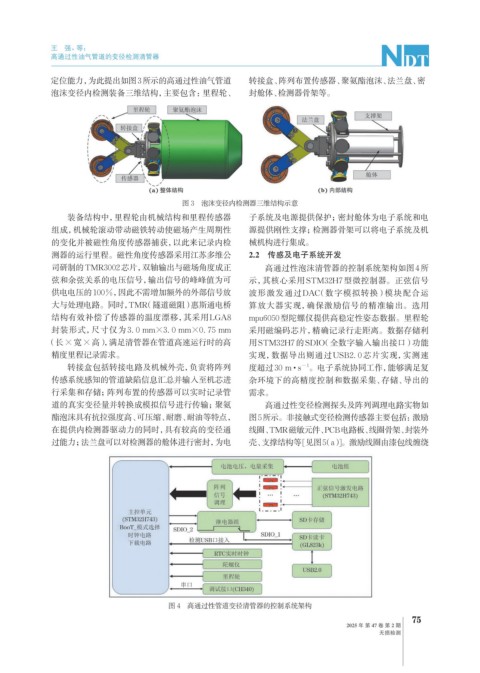
定位能力,为此提出如图3所示的高通过性油气管道 转接盒、阵列布置传感器、聚氨酯泡沫、法兰盘、密
泡沫变径内检测装备三维结构,主要包含:里程轮、 封舱体、检测器骨架等。
图 3 泡沫变径内检测器三维结构示意
装备结构中,里程轮由机械结构和里程传感器 子系统及电源提供保护;密封舱体为电子系统和电
组成,机械轮滚动带动磁铁转动使磁场产生周期性 源提供刚性支撑;检测器骨架可以将电子系统及机
的变化并被磁性角度传感器捕获,以此来记录内检 械机构进行集成。
测器的运行里程。磁性角度传感器采用江苏多维公 2.2 传感及电子系统开发
司研制的TMR3002芯片,双轴输出与磁场角度成正 高通过性泡沫清管器的控制系统架构如图4所
弦和余弦关系的电压信号,输出信号的峰峰值为可 示,其核心采用STM32H7型微控制器。正弦信号
供电电压的100%,因此不需增加额外的外部信号放 波形激发通过DAC(数字模拟转换)模块配合运
大与处理电路。同时,TMR(隧道磁阻) 惠斯通电桥 算放大器实现,确保激励信号的精准输出。选用
结构有效补偿了传感器的温度漂移,其采用LGA8 mpu6050型陀螺仪提供高稳定性姿态数据。里程轮
封装形式,尺寸仅为 3. 0 mm×3. 0 mm×0. 75 mm 采用磁编码芯片,精确记录行走距离。数据存储利
(长×宽×高),满足清管器在管道高速运行时的高 用STM32H7的SDIO(全数字输入输出接口)功能
精度里程记录需求。 实现,数据导出则通过USB2. 0 芯片实现,实测速
转接盒包括转接电路及机械外壳,负责将阵列 度超过30 m · s 。电子系统协同工作,能够满足复
−1
传感系统感知的管道缺陷信息汇总并输入至机芯进 杂环境下的高精度控制和数据采集、存储、导出的
行采集和存储;阵列布置的传感器可以实时记录管 需求。
道的真实变径量并转换成模拟信号进行传输;聚氨 高通过性变径检测探头及阵列调理电路实物如
酯泡沫具有抗拉强度高、可压缩、耐磨、耐油等特点, 图5所示。非接触式变径检测传感器主要包括:激励
在提供内检测器驱动力的同时,具有较高的变径通 线圈、TMR磁敏元件、PCB电路板、 线圈骨架、封装外
过能力;法兰盘可以对检测器的舱体进行密封,为电 壳、支撑结构等[见图5(a)。激励线圈由漆包线缠绕
]
图 4 高通过性管道变径清管器的控制系统架构
75
2025 年 第 47 卷 第 2 期
无损检测