
Page 65 - 无损检测2024年第十二期
P. 65
张佳莹,等:
曲面复合材料部件的自动相控阵超声检测
z 中红色线为轨迹线,可以满足轮式相控阵探头检测
1 需求。
z 2 (3)
换行时利用龙门z轴使轮式相控阵探头从试件
z 表面抬起安全的距离,然后移动到下一条扫查轨迹
n
线的起点,为了提高效率,同样采用蛇形检测。
求解方程为
轮式相控阵探头检测中需要确保探头和试件表
T
T
A Aa =A b (4) 面的良好耦合,除了在检测过程中持续在探头表面
T
式中:A 为A的转置矩阵,参数向量a即为a ,a , 喷水来提供水做耦合剂外,机械手夹持探头时的位
0
1
a ,a ,a ,a 的值。 置和姿态更加重要。
2
3
4
5
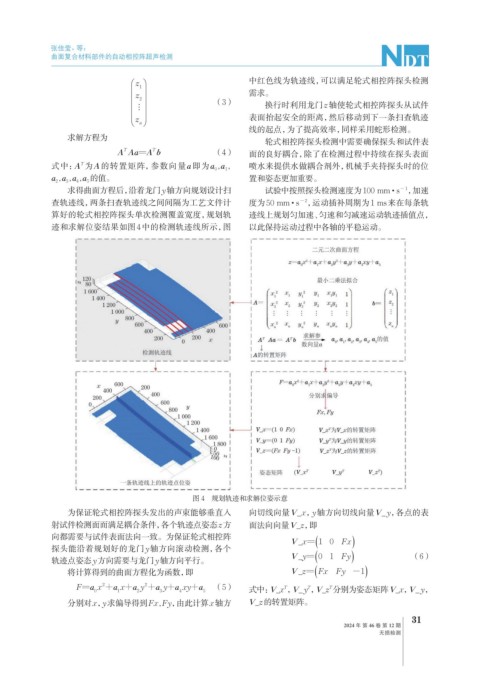
求得曲面方程后,沿着龙门y轴方向规划设计扫 试验中按照探头检测速度为100 mm · s ,加速
−1
查轨迹线,两条扫查轨迹线之间间隔为工艺文件计 度为50 mm · s ,运动插补周期为1 ms来在每条轨
−2
算好的轮式相控阵探头单次检测覆盖宽度,规划轨 迹线上规划匀加速、匀速和匀减速运动轨迹插值点,
迹和求解位姿结果如图4中的检测轨迹线所示,图 以此保持运动过程中各轴的平稳运动。
图 4 规划轨迹和求解位姿示意
为保证轮式相控阵探头发出的声束能够垂直入 向切线向量V_x,y轴方向切线向量V_y,各点的表
射试件检测面而满足耦合条件,各个轨迹点姿态z方 面法向向量V_z,即
(
向都需要与试件表面法向一致。为保证轮式相控阵 V x =1 0 Fx )
探头能沿着规划好的龙门y轴方向滚动检测,各个 _ ( )
轨迹点姿态y方向需要与龙门y轴方向平行。 V y _ =0 1 Fy (6)
(
将计算得到的曲面方程化为函数,即 V z _ = Fx Fy -1 )
= F a 2 + x a + x a 2 + y a + y a + xy a (5) 式中:V_x ,V_y ,V_z 分别为姿态矩阵V_x,V_y,
T
T
T
0 1 2 3 4 5
分别对x,y求偏导得到Fx,Fy,由此计算x轴方 V_z的转置矩阵。
31
2024 年 第 46 卷 第 12 期
无损检测