
Page 64 - 无损检测2024年第十二期
P. 64
张佳莹,等:
曲面复合材料部件的自动相控阵超声检测
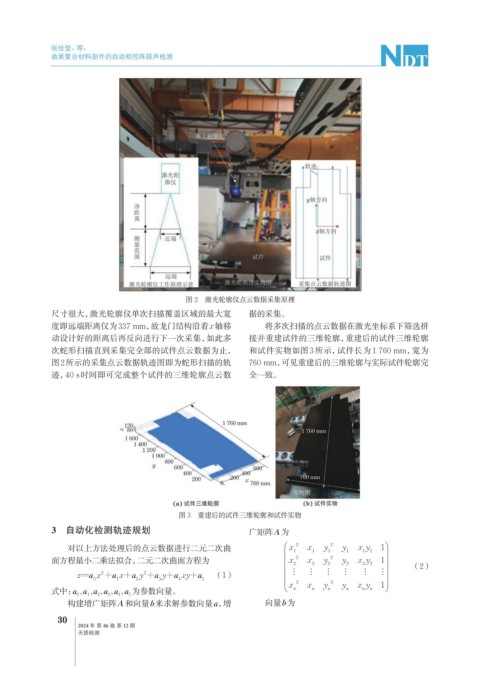
图 2 激光轮廓仪点云数据采集原理
尺寸很大,激光轮廓仪单次扫描覆盖区域的最大宽 据的采集。
度即远端距离仅为337 mm,故龙门结构沿着x轴移 将多次扫描的点云数据在激光坐标系下筛选拼
动设计好的距离后再反向进行下一次采集,如此多 接并重建试件的三维轮廓,重建后的试件三维轮廓
次蛇形扫描直到采集完全部的试件点云数据为止, 和试件实物如图 3所示,试件长为 1 760 mm,宽为
图2所示的采集点云数据轨迹图即为蛇形扫描的轨 760 mm,可见重建后的三维轮廓与实际试件轮廓完
迹,40 s时间即可完成整个试件的三维轮廓点云数 全一致。
图 3 重建后的试件三维轮廓和试件实物
3 自动化检测轨迹规划 广矩阵A为
对以上方法处理后的点云数据进行二元二次曲 x 1 2 x 1 y 1 2 y 1 xy 1 1
1
面方程最小二乘法拟合,二元二次曲面方程为 x 2 2 x y 2 y xy 1
2 2 2 2 2 (2)
= z a 2 + x a + x a 2 + y a + y a + xy a (1)
0 1 2 3 4 5
x 2 x y 2 y xy 1
式中:a ,a ,a ,a ,a ,a 为参数向量。 n n n n n n
0 1 2 3 4 5
构建增广矩阵A和向量b来求解参数向量a,增 向量b为
30
2024 年 第 46 卷 第 12 期
无损检测