
Page 67 - 无损检测2024年第八期
P. 67
张云淼,等:
基于三维仿形建模的曲面构件水浸超声检测
未熔合等类型的缺陷,需对产品的内部质量进行无
损检测。超声检测具有高效、准确、灵敏度高、检测
结果清晰直观等特点,在产品内体积型缺陷的评价
方面具有优势。而复杂型面构件要求超声C扫描检
测时探头具有能跟踪产品表面曲面特征以及自动调
整姿态的功能,以保证水距和声束垂直于被检构件
表面。国内外的研究机构针对超声C扫描过程中的
路径仿形技术均开展了一定研究。黄光胜等 通过
[3]
对CATIA-CAA二次开发设计了与CAITA系统无
缝集成的复材构件超声C扫描轨迹规划系统,实现
了基于三维数字模型的复材构件扫描检测轨迹的
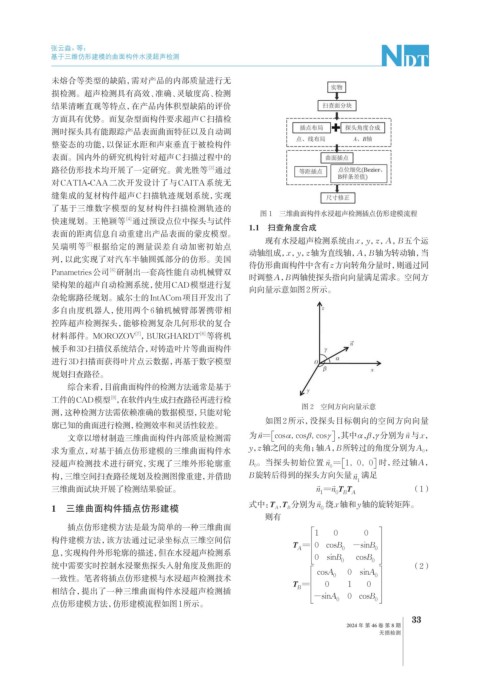
图 1 三维曲面构件水浸超声检测插点仿形建模流程
[4]
快速规划。王艳颖等 通过预设点位中探头与试件
1.1 扫查角度合成
表面的距离信息自动重建出产品表面的蒙皮模型。
现有水浸超声检测系统由x, y, z, A, B五个运
吴瑞明等 根据给定的测量误差自动加密初始点
[5]
动轴组成, x, y, z轴为直线轴, A, B轴为转动轴,当
列,以此实现了对汽车半轴圆弧部分的仿形。美国
待仿形曲面构件中含有z方向转角分量时,则通过同
[6]
Panametries公司 研制出一套高性能自动机械臂双
时调整A, B两轴使探头指向向量满足需求。空间方
梁构架的超声自动检测系统,使用CAD模型进行复
向向量示意如图2所示。
杂轮廓路径规划。威尔士的IntACom项目开发出了
多自由度机器人,使用两个6轴机械臂部署携带相
控阵超声检测探头,能够检测复杂几何形状的复合
材料部件。MOROZOV ,BURGHARDT 等将机
[7]
[8]
械手和3D扫描仪系统结合,对铸造叶片等曲面构件
进行3D扫描而获得叶片点云数据,再基于数字模型
规划扫查路径。
综合来看,目前曲面构件的检测方法通常是基于
[9]
工件的CAD模型 ,在软件内生成扫查路径再进行检
图 2 空间方向向量示意
测,这种检测方法需依赖准确的数据模型,只能对轮
如图2所示,没探头目标朝向的空间方向向量
廓已知的曲面进行检测,检测效率和灵活性较差。
文章以增材制造三维曲面构件内部质量检测需 为 = cos , cos , cosα n β γ ,其中α,β,γ 分别为 n 与x,
求为重点,对基于插点仿形建模的三维曲面构件水 y,z轴之间的夹角;轴A,B所转过的角度分别为A ,
0
浸超声检测技术进行研究,实现了三维外形轮廓重 B 。当探头初始位置 n 0 = 1, 0, 0 时,经过轴A,
0
构,三维空间扫查路径规划及检测图像重建,并借助 B旋转后得到的探头方向矢量 n 满足
1
三维曲面试块开展了检测结果验证。 n 1 =n TT (1)
BA
0
1 三维曲面构件插点仿形建模 式中:T ,T 分别为 n 绕x轴和y轴的旋转矩阵。
B
A
0
则有
插点仿形建模方法是最为简单的一种三维曲面
构件建模方法,该方法通过记录坐标点三维空间信 1 0 0
T A = 0 cosB 0 -sinB
息,实现构件外形轮廓的描述,但在水浸超声检测系 0
0 sinB 0 cosB 0
统中需要实时控制水浸聚焦探头入射角度及焦距的 cosA 0 sinA (2)
一致性。笔者将插点仿形建模与水浸超声检测技术 0 0
B = T 0 1 0
相结合,提出了一种三维曲面构件水浸超声检测插 -sinA 0 cosB
点仿形建模方法,仿形建模流程如图1所示。 0 0
33
2024 年 第 46 卷 第 8 期
无损检测