
Page 44 - 无损检测2024年第七期
P. 44
万 浩,等:
柔性科赫分形涡流传感器 C 扫描试验分析
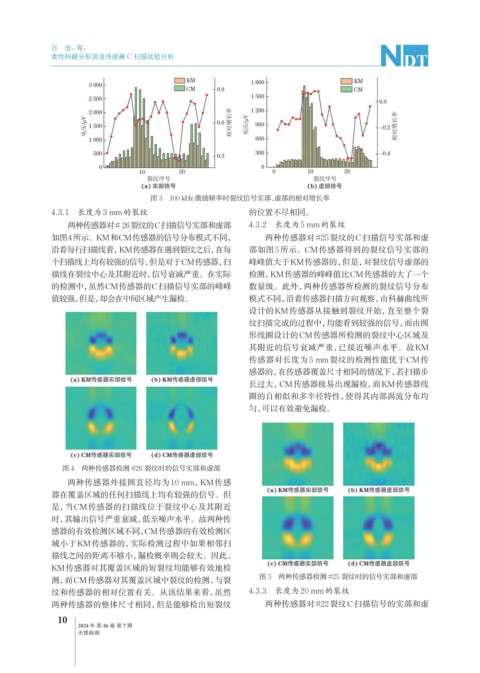
图 3 100 kHz 激励频率时裂纹信号实部、虚部的相对增长率
4.3.1 长度为3 mm的裂纹 的位置不尽相同。
两种传感器对# 26裂纹的C扫描信号实部和虚部 4.3.2 长度为5 mm的裂纹
如图4所示。KM和CM传感器的信号分布模式不同, 两种传感器对#25裂纹的C扫描信号实部和虚
沿着每行扫描线看,KM传感器在遇到裂纹之后,在每 部如图5所示。CM传感器得到的裂纹信号实部的
个扫描线上均有较强的信号,但是对于CM传感器,扫 峰峰值大于KM传感器的,但是,对裂纹信号虚部的
描线在裂纹中心及其附近时,信号衰减严重。在实际 检测,KM传感器的峰峰值比CM传感器的大了一个
的检测中,虽然CM传感器的C扫描信号实部的峰峰 数量级。此外,两种传感器所检测的裂纹信号分布
值较强,但是,却会在中间区域产生漏检。 模式不同,沿着传感器扫描方向观察,由科赫曲线所
设计的KM传感器从接触到裂纹开始,直至整个裂
纹扫描完成的过程中,均能看到较强的信号,而由圆
形线圈设计的CM传感器所检测的裂纹中心区域及
其附近的信号衰减严重,已接近噪声水平。故KM
传感器对长度为5 mm裂纹的检测性能优于CM传
感器的,在传感器覆盖尺寸相同的情况下,若扫描步
长过大,CM传感器极易出现漏检,而KM传感器线
圈的自相似和多半径特性,使得其内部涡流分布均
匀,可以有效避免漏检。
图 4 两种传感器检测 #26 裂纹时的信号实部和虚部
两种传感器外接圆直径均为10 mm,KM传感
器在覆盖区域的任何扫描线上均有较强的信号。但
是,当CM传感器的扫描线位于裂纹中心及其附近
时,其输出信号严重衰减,低至噪声水平。故两种传
感器的有效检测区域不同,CM传感器的有效检测区
域小于KM传感器的,实际检测过程中如果相邻扫
描线之间的距离不够小,漏检概率则会较大。因此,
KM传感器对其覆盖区域的短裂纹均能够有效地检
测,而CM传感器对其覆盖区域中裂纹的检测,与裂 图 5 两种传感器检测 #25 裂纹时的信号实部和虚部
纹和传感器的相对位置有关。从该结果来看,虽然 4.3.3 长度为20 mm的裂纹
两种传感器的整体尺寸相同,但是能够检出短裂纹 两种传感器对#22裂纹C扫描信号的实部和虚
10
2024 年 第 46 卷 第 7 期
无损检测