
Page 43 - 无损检测2024年第七期
P. 43
万 浩,等:
柔性科赫分形涡流传感器 C 扫描试验分析
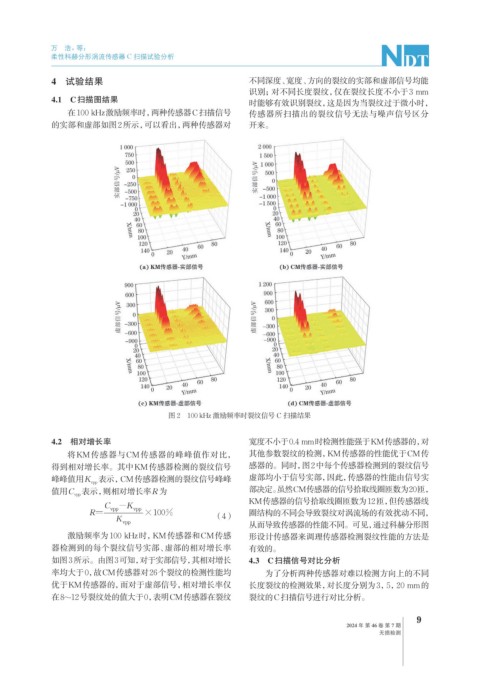
4 试验结果 不同深度、宽度、方向的裂纹的实部和虚部信号均能
识别;对不同长度裂纹,仅在裂纹长度不小于3 mm
4.1 C扫描图结果 时能够有效识别裂纹,这是因为当裂纹过于微小时,
在100 kHz激励频率时,两种传感器C扫描信号 传感器所扫描出的裂纹信号无法与噪声信号区分
的实部和虚部如图2所示,可以看出,两种传感器对 开来。
图 2 100 kHz 激励频率时裂纹信号 C 扫描结果
4.2 相对增长率 宽度不小于0.4 mm时检测性能强于KM传感器的,对
将KM传感器与CM传感器的峰峰值作对比, 其他参数裂纹的检测,KM传感器的性能优于CM传
得到相对增长率。其中KM传感器检测的裂纹信号 感器的。同时,图2中每个传感器检测到的裂纹信号
峰峰值用K 表示,CM传感器检测的裂纹信号峰峰 虚部均小于信号实部,因此,传感器的性能由信号实
vpp
值用C 表示,则相对增长率R为 部决定。虽然CM传感器的信号拾取线圈匝数为20匝,
vpp
KM传感器的信号拾取线圈匝数为12匝,但传感器线
× 圈结构的不同会导致裂纹对涡流场的有效扰动不同,
(4)
从而导致传感器的性能不同。可见,通过科赫分形图
激励频率为100 kHz时,KM传感器和CM传感 形设计传感器来调理传感器检测裂纹性能的方法是
器检测到的每个裂纹信号实部、虚部的相对增长率 有效的。
如图3所示。由图3可知,对于实部信号,其相对增长 4.3 C扫描信号对比分析
率均大于0,故CM传感器对26个裂纹的检测性能均 为了分析两种传感器对难以检测方向上的不同
优于KM传感器的,而对于虚部信号,相对增长率仅 长度裂纹的检测效果,对长度分别为3,5,20 mm的
在8~12号裂纹处的值大于0,表明CM传感器在裂纹 裂纹的C扫描信号进行对比分析。
9
2024 年 第 46 卷 第 7 期
无损检测