
Page 39 - 无损检测2024年第七期
P. 39
王 堃,等:
基于机器视觉的火箭贮箱焊缝射线检测
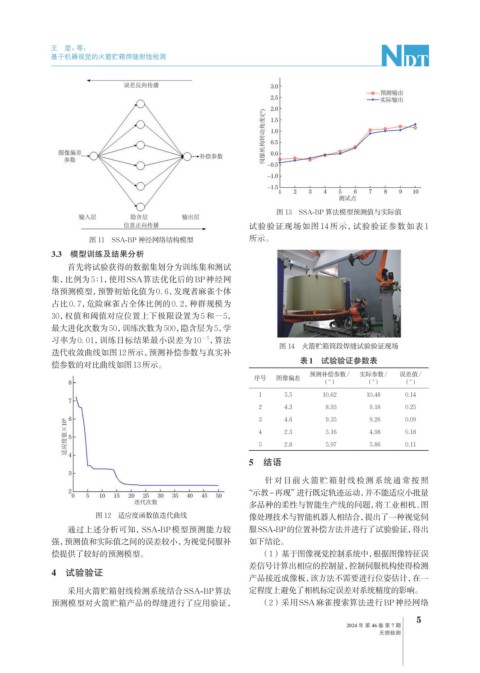
图 13 SSA-BP 算法模型预测值与实际值
试验验证现场如图 14 所示,试验验证参数如表 1
图 11 SSA-BP 神经网络结构模型 所示。
3.3 模型训练及结果分析
首先将试验获得的数据集划分为训练集和测试
集,比例为5∶1,使用SSA算法优化后的BP神经网
络预测模型,预警初始化值为0. 6,发现者麻雀个体
占比0. 7,危险麻雀占全体比例的0. 2,种群规模为
30,权值和阈值对应位置上下极限设置为5和-5,
最大进化次数为50,训练次数为500,隐含层为5,学
习率为0. 01,训练目标结果最小误差为10 ,算法
−5
图 14 火箭贮箱筒段焊缝试验验证现场
迭代收敛曲线如图12所示,预测补偿参数与真实补
表1 试验验证参数表
偿参数的对比曲线如图13所示。
预测补偿参数/ 实际参数/ 误差值/
序号 图像偏差
(°) (°) (°)
1 5.5 10.62 10.48 0.14
2 4.3 8.93 9.18 0.25
3 4.6 9.35 9.26 0.09
4 2.3 5.16 4.98 0.18
5 2.8 5.97 5.86 0.11
5 结语
针对目前火箭贮箱射线检测系统通常按照
“示教-再现”进行既定轨迹运动,并不能适应小批量
多品种的柔性与智能生产线的问题,将工业相机、图
图 12 适应度函数值迭代曲线 像处理技术与智能机器人相结合,提出了一种视觉伺
通过上述分析可知,SSA-BP模型预测能力较 服SSA-BP的位置补偿方法并进行了试验验证,得出
强,预测值和实际值之间的误差较小,为视觉伺服补 如下结论。
偿提供了较好的预测模型。 (1)基于图像视觉控制系统中,根据图像特征误
差信号计算出相应的控制量,控制伺服机构使得检测
4 试验验证
产品接近成像板,该方法不需要进行位姿估计,在一
采用火箭贮箱射线检测系统结合SSA-BP算法 定程度上避免了相机标定误差对系统精度的影响。
预测模型对火箭贮箱产品的焊缝进行了应用验证, (2)采用SSA麻雀搜索算法进行BP神经网络
5
2024 年 第 46 卷 第 7 期
无损检测