
Page 49 - 无损检测2024年第七期
P. 49
郑赛春,等:
管型核燃料元件芯体定位检测系统
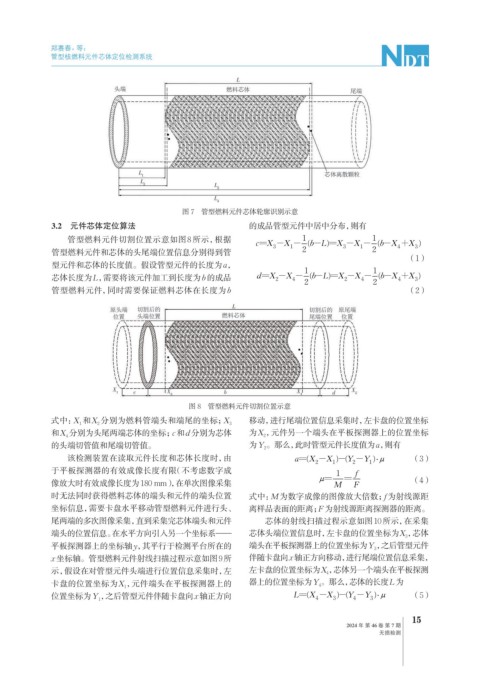
图 7 管型燃料元件芯体轮廓识别示意
3.2 元件芯体定位算法 的成品管型元件中居中分布,则有
1
管型燃料元件切割位置示意如图8所示,根据 c =X -X - (- )=X -X - (-X +X )
1
b L
b
管型燃料元件和芯体的头尾端位置信息分别得到管 3 1 2 3 1 2 4 3
(1)
型元件和芯体的长度值。假设管型元件的长度为a,
1
1
bL
)
芯体长度为L,需要将该元件加工到长度为b的成品 d =X 2 -X 4 - ( - )=X 2 -X 4 - ( -bX 4 +X
3
2 2
管型燃料元件,同时需要保证燃料芯体在长度为b (2)
图 8 管型燃料元件切割位置示意
式中:X 和X 分别为燃料管端头和端尾的坐标;X 3 移动,进行尾端位置信息采集时,左卡盘的位置坐标
2
1
和X 分别为头尾两端芯体的坐标;c和d分别为芯体 为X ,元件另一个端头在平板探测器上的位置坐标
4 2
的头端切管值和尾端切管值。 为Y 。那么,此时管型元件长度值为a,则有
2
Y
该检测装置在读取元件长度和芯体长度时,由 a =(X -X )-( -Y ) µ (3)
2 1 2 1
于平板探测器的有效成像长度有限(不考虑数字成 f
= µ 1 =
像放大时有效成像长度为180 mm),在单次图像采集 M F (4)
时无法同时获得燃料芯体的端头和元件的端头位置 式中:M为数字成像的图像放大倍数;f为射线源距
坐标信息,需要卡盘水平移动管型燃料元件进行头、 离样品表面的距离;F为射线源距离探测器的距离。
尾两端的多次图像采集,直到采集完芯体端头和元件 芯体的射线扫描过程示意如图10所示,在采集
端头的位置信息。在水平方向引入另一个坐标系—— 芯体头端位置信息时,左卡盘的位置坐标为X ,芯体
3
平板探测器上的坐标轴y,其平行于检测平台所在的 端头在平板探测器上的位置坐标为Y ,之后管型元件
3
x坐标轴。管型燃料元件射线扫描过程示意如图9所 伴随卡盘向x轴正方向移动,进行尾端位置信息采集,
示,假设在对管型元件头端进行位置信息采集时,左 左卡盘的位置坐标为X ,芯体另一个端头在平板探测
4
卡盘的位置坐标为X ,元件端头在平板探测器上的 器上的位置坐标为Y 。那么,芯体的长度L为
4
1
位置坐标为Y ,之后管型元件伴随卡盘向x轴正方向 L =(X 4 -X 3 )-(Y 4 -Y 3 ) µ (5)
1
15
2024 年 第 46 卷 第 7 期
无损检测