
Page 81 - 无损检测2025年第四期
P. 81
胡照星:
探地雷达图像浅层特征融合下的高速公路路基塌陷病害识别
幅和电阻率检测公路中的含水情况,来检测公路路 根据电磁波理论,电磁波穿过不同的物质时会
基病害。该方法需要多种测试设备,并且对测试环 产生不同的反射和折射结果,公式表达为
[7]
境的敏感性要求较高,存在明显局限性。JUDGE 等 2 α
T 1 (1)
提出的缺陷检测方法,以机器学习为基础,结合射线 = α + α
图像实现相干衍射数据自动化处理,根据处理的结果 1 2
量化检测结果中的一维(1D)和二维(2D)缺陷,该 α - α
R = 1 2 (2)
方法存在高度依赖于训练数据质量和数量的问题以 α + α
1 2
及泛化性问题,实际应用较为困难。MUKHERJEE 等 [8]
式中:T为折射系数; α ,α 为上/下层物质的介电
提出一种缺陷检测方法,以贝叶斯决策理论方法来进 1 2
常数;R为反射系数。
行缺陷监测,并且根据最优调整的加权分类损失实现
由于高速公路路基与下层泥土的成分明显不
对缺陷位置和尺寸的确定,由于贝叶斯决策理论研究
同,因此可以形成一个质量极好的反射层用于反射
需要先验信息来完成准确检测,因此对贝叶斯决策理
探地雷达的电磁波,在这种情况下对路基进行检测,
论进行了改进。但是贝叶斯决策理论的计算较为复
若路基质量良好则会形成一个完整的结构,若路基
杂,计算过程较慢。
存在病害则会在雷达图像中有所展示。
CNN网络具备出色的特征提取能力 ,可自动
[9]
1.1.2 探地雷达图像正演模拟
从原始图像中学习并提取关键信息;通过权值共享
麦克斯韦(Maxwell)方程组是研究电磁现象最
机制,大幅减少网络参数,提升计算效率;同时,其
重要的方程,进行探地雷达图像正演模拟时需要依
平移不变性增强了模型的泛化能力,适用于多种图
据Maxwell方程组的两个旋度方程, 公式表达为
像识别任务。基于此,文章提出探地雷达图像浅层
特征融合下的高速公路路基塌陷病害识别,通过卷 (3)
积神经网络将提取到的图像特征进行融合,达到更
加准确地识别高速公路路基常见病变的目的。 (4)
1 基于探地雷达的高速公路路基塌陷病害 式中: ×∇ 为旋度计算;H、E分别为磁场和电场的强
识别 度;为时间;σ 为电导率;σ 为等效磁导率。
t
m
采用Yee氏网格划分的时域有限差分方程 [12] ,
1.1 基于探地雷达的路基图像获取
得到探地雷达的正演方程
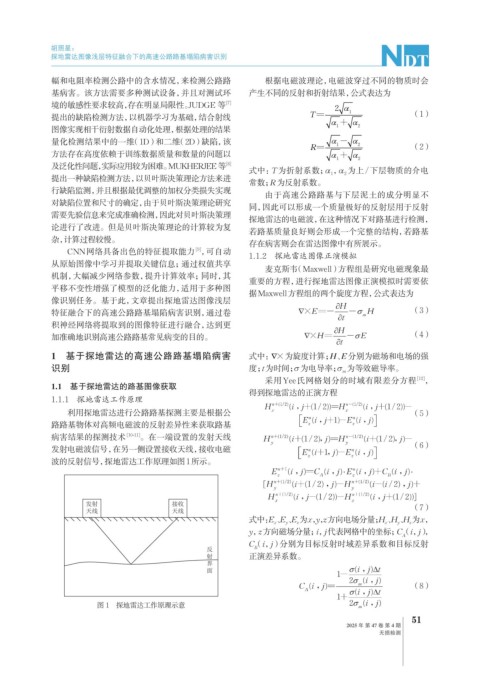
1.1.1 探地雷达工作原理
利用探地雷达进行公路路基探测主要是根据公 (5)
路路基物体对高频电磁波的反射差异性来获取路基
病害结果的探测技术 [10-11] 。在一端设置的发射天线
(6)
发射电磁波信号,在另一侧设置接收天线,接收电磁
波的反射信号,探地雷达工作原理如图1所示。
发射 接收 (7)
天线 天线
y
z
式中:E 、E 、E 为x,,方向电场分量;H 、H 、H 为x,
z
z
y
x
x
y
y,z方向磁场分量;i,j代表网格中的坐标;C(i,j),
A
C(i,j)分别为目标反射时域差异系数和目标反射
反 B
射 正演差异系数。
界
面
(8)
图 1 探地雷达工作原理示意
51
2025 年 第 47 卷 第 4 期
无损检测