
Page 84 - 无损检测2025年第四期
P. 84
胡照星:
探地雷达图像浅层特征融合下的高速公路路基塌陷病害识别
基于以上超参数,对CNN超进行训练,训练过 仅始终低于BP与RBF网络的,而且在训练后期几
程如下。 乎不再产生波动,能够保持极低的损失率。这一特
(1)数据预处理:归一化、标准化、数据增强,以 点使得CNN网络在处理复杂问题时具有更高的准
提高模型的训练效果。 确性和稳定性,为高速公路路基病变识别应用提供
(2)初始化模型参数:利用Xavier初始化网络的 了更为可靠的解决方案。
权重和偏置。 考虑到不同路段之间可能存在的地质条件、交
(3)前向传播:将输入数据通过网络,从输入层 通负荷等因素的差异,通过归一化方法对收集到的
到输出层逐层计算输出。其包括卷积层、激活函数、 数据进行标准化处理,可以将不同路段的交通负荷
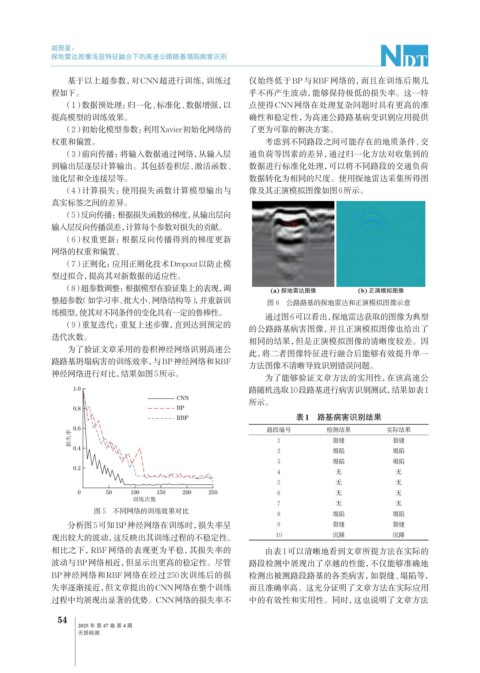
池化层和全连接层等。 数据转化为相同的尺度。使用探地雷达采集所得图
(4)计算损失:使用损失函数计算模型输出与 像及其正演模拟图像如图6所示。
真实标签之间的差异。
(5) 反向传播:根据损失函数的梯度,从输出层向
输入层反向传播误差,计算每个参数对损失的贡献。
(6)权重更新:根据反向传播得到的梯度更新
网络的权重和偏置。
(7)正则化:应用正则化技术Dropout以防止模
型过拟合,提高其对新数据的适应性。
(8) 超参数调整:根据模型在验证集上的表现,调 (a) 探地雷达图像 (b) 正演模拟图像
整超参数(如学习率、批大小、网络结构等),并重新训 图 6 公路路基的探地雷达和正演模拟图像示意
练模型,使其对不同条件的变化具有一定的鲁棒性。
通过图6可以看出,探地雷达获取的图像为典型
(9)重复迭代:重复上述步骤,直到达到预定的
的公路路基病害图像,并且正演模拟图像也给出了
迭代次数。
相同的结果,但是正演模拟图像的清晰度较差。因
为了验证文章采用的卷积神经网络识别高速公
此,将二者图像特征进行融合后能够有效提升单一
路路基坍塌病害的训练效率,与BP神经网络和RBF
方法图像不清晰导致识别错误问题。
神经网络进行对比,结果如图5所示。
为了能够验证文章方法的实用性,在该高速公
1.0 路随机选取10段路基进行病害识别测试,结果如表1
CNN
所示。
0.8 BP
RBF 表1 路基病害识别结果
0.6 路段编号 检测结果 实际结果
损失率 1 裂缝 裂缝
0.4
2 塌陷 塌陷
3 塌陷 塌陷
0.2
4 无 无
5 无 无
0 50 100 150 200 250 6 无 无
训练次数
7 无 无
图 5 不同网络的训练效果对比
8 塌陷 塌陷
分析图5可知BP神经网络在训练时,损失率呈 9 裂缝 裂缝
现出较大的波动,这反映出其训练过程的不稳定性。 10 沉降 沉降
相比之下,RBF网络的表现更为平稳,其损失率的 由表1可以清晰地看到文章所提方法在实际的
波动与BP网络相近,但显示出更高的稳定性。尽管 路段检测中展现出了卓越的性能,不仅能够准确地
BP神经网络和RBF网络在经过250次训练后的损 检测出被测路段路基的各类病害,如裂缝、塌陷等,
失率逐渐接近,但文章提出的CNN网络在整个训练 而且准确率高。这充分证明了文章方法在实际应用
过程中均展现出显著的优势。CNN网络的损失率不 中的有效性和实用性。同时,这也说明了文章方法
54
2025 年 第 47 卷 第 4 期
无损检测