
Page 115 - 无损检测2023年第十二期
P. 115
汪卫众, 等:
抽油管缺陷漏磁检测系统设计
算法与差分算法结合使用。当传感器 S1 与 S2 位
向, 励磁线圈断电。系统主控程序流程图如图 6
所示。 于缺陷上方时, H 1 与 H 2 为线圈在传感器处产生的
可
漏磁场 H 的径向分量大小, H 1 与 H 2 的差 H 12
为传感器收
消除磁敏传感器的偏置分量; N 1 与 N 2
到的机械振动、 提离值变化等产生的共模干扰, N 1
接近0 , 因此, 采用该方法有效消除
与 N 2 的差 N 12
共模干扰的同时还能对缺陷漏磁场进行差模侦测。
其中输出 y 可表示为
( ) ( )
y= H 1+N 1 - H 2+N 2 =H 12+N 12
( 9 )
≈ H 12
传感器布局方式和差分方式如2.2.1节所示。
图6 系统主控程序流程图
2.2.2 阵列传感器滤波和差分算法设计
信号调理电路只能将部分噪声滤除, 有些低频
分量无法滤除, 笔者通过使用变步长 LMS ( 最小均
方算法) 自 适 应 滤 波 算 法 可 有 效 将 低 频 噪 声 滤
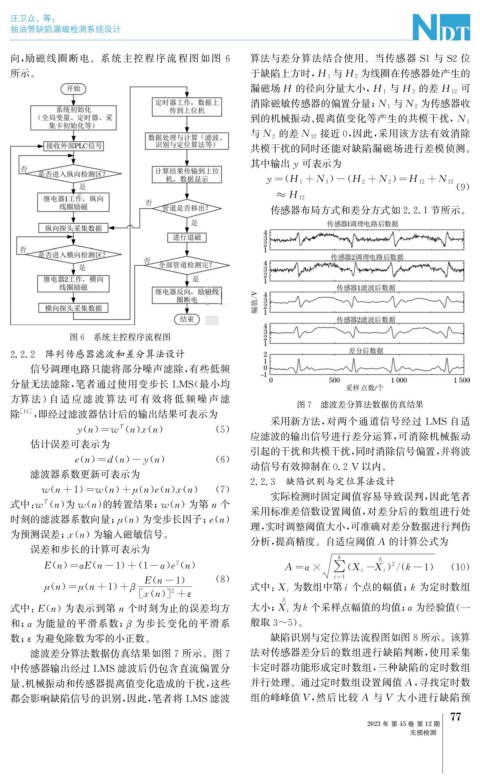
图7 滤波差分算法数据仿真结果
除 [ 14 ] , 即经过滤波器估计后的输出结果可表示为
采用新方法, 对两个通道信号经过 LMS 自适
T
y n ) w ( n ) x ( n ) ( 5 ) 应滤波的输出信号进行差分运算, 可消除机械振动
(
=
估计误差可表示为
引起的干扰和共模干扰, 同时消除信号偏置, 并将波
=
e ( n ) d ( n ) -y n ) ( 6 )
(
动信号有效抑制在0.2V 以内。
滤波器系数更新可表示为
2.2.3 缺陷识别与定位算法设计
(
=
w ( n+1 ) w ( n ) + μ n ) e ( n ) x ( n ) ( 7 ) 实际检测时固定阈值容易导致误判, 因此笔者
T
式中: w ( n ) 为 w ( n ) 的转置结果; w ( n ) 为第n 个
采用标准差倍数设置阈值, 对差分后的数组进行处
时刻的滤波器系数向量; ( n ) 为变步长因子; e ( n )
μ
理, 实时调整阈值大小, 可准确对差分数据进行判伤
为预测误差; x ( n ) 为输入磁敏信号。
分析, 提高精度。自适应阈值 A 的计算公式为
误差和步长的计算可表示为
k
∧
2
=
E ( n ) αE ( n-1 ) ( 1- α ) e ( n ) A = α× ∑ ( X i- X i )/( k-1 ) ( 10 )
+
2
E ( n-1 ) ( 8 ) i = 1
μ n ) = μ n+1 ) + β [ x ( n )] ε 式中: X i 为数组中第 i 个点的幅值; k 为定时数组
(
(
2
+
∧
为
式中: E ( n ) 为表示到第n 个时刻为止的误差均方 大小; X i k 个采样点幅值的均值; α 为经验值( 一
和; α 为能量的平滑系数; 为步长变化的平滑系 般取3~5 )。
β
数; ε 为避免除数为零的小正数。 缺陷识别与定位算法流程图如图8所示。该算
法对传感器差分后的数组进行缺陷判断, 使用采集
滤波差分算法数据仿真结果如图7所示。图7
中传感器输出经过 LMS滤波后仍包含直流偏置分 卡定时器功能形成定时数组, 三种缺陷的定时数组
量、 机械振动和传感器提离值变化造成的干扰, 这些 并行处理。通过定时数组设置阈值 A , 寻找定时数
都会影响缺陷信号的识别, 因此, 笔者将 LMS滤波 组的峰峰值V , 然后比较 A 与V 大小进行缺陷预
7
7
2023年 第45卷 第12期
无损检测