
Page 110 - 无损检测2023年第十二期
P. 110
马金鑫, 等:
基于无人机智能视觉的大型特种设备表面缺陷检测
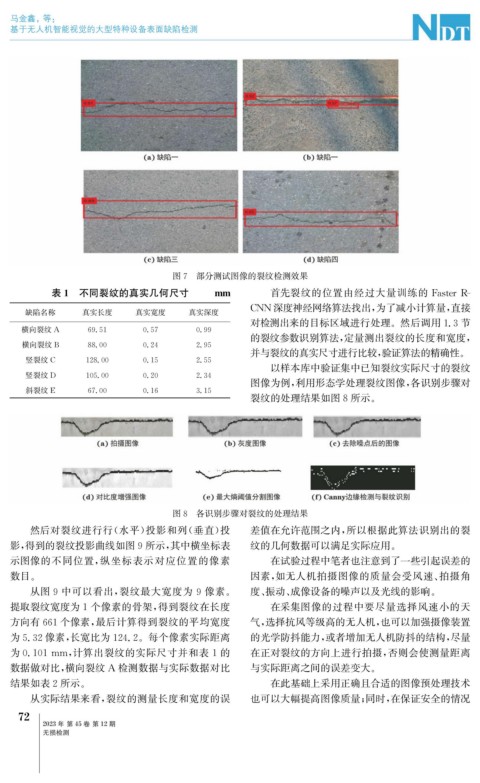
图7 部分测试图像的裂纹检测效果
表1 不同裂纹的真实几何尺寸 mm 首先裂纹的位置由经过大量训练的 FasterR-
CNN 深度神经网络算法找出, 为了减小计算量, 直接
缺陷名称 真实长度 真实宽度 真实深度
对检测出来的目标区域进行处理。然后调用1.3节
横向裂纹 A 69.51 0.57 0.99
的裂纹参数识别算法, 定量测出裂纹的长度和宽度,
横向裂纹 B 88.00 0.24 2.95
并与裂纹的真实尺寸进行比较, 验证算法的精确性。
竖裂纹 C 128.00 0.15 2.55
以样本库中验证集中已知裂纹实际尺寸的裂纹
竖裂纹 D 105.00 0.20 2.34
图像为例, 利用形态学处理裂纹图像, 各识别步骤对
斜裂纹 E 67.00 0.16 3.15
裂纹的处理结果如图8所示。
图8 各识别步骤对裂纹的处理结果
然后对裂纹进行行( 水平) 投影和列( 垂直) 投 差值在允许范围之内, 所以根据此算法识别出的裂
影, 得到的裂纹投影曲线如图9所示, 其中横坐标表 纹的几何数据可以满足实际应用。
示图像的不同位置, 纵坐标表示对应位置的像素 在试验过程中笔者也注意到了一些引起误差的
数目。 因素, 如无人机拍摄图像的质量会受风速、 拍摄角
从图9 中可以看出, 裂纹最大宽度为 9 像素。 度、 振动、 成像设备的噪声以及光线的影响。
提取裂纹宽度为1个像素的骨架, 得到裂纹在长度 在采集图像的过程中要尽量选择风速小的天
方向有661个像素, 最后计算得到裂纹的平均宽度 气, 选择抗风等级高的无人机, 也可以加强摄像装置
为5.32像素, 长宽比为124.2 。每个像素实际距离 的光学防抖能力, 或者增加无人机防抖的结构, 尽量
为0.101mm , 计算出裂纹的实际尺寸并和表 1 的 在正对裂纹的方向上进行拍摄, 否则会使测量距离
数据做对比, 横向裂纹 A 检测数据与实际数据对比 与实际距离之间的误差变大。
结果如表2所示。 在此基础上采用正确且合适的图像预处理技术
从实际结果来看, 裂纹的测量长度和宽度的误 也可以大幅提高图像质量; 同时, 在保证安全的情况
7
2
2023年 第45卷 第12期
无损检测