
Page 97 - 无损检测2023年第十一期
P. 97
张义凤, 等:
变厚度工件的超声 C扫描成像数据采集方法
信号采集区域确认在上表面回波与底波之间的检测
区间内, 直观表征零件内部的缺陷状态 [ 7 ] ; 但一旦遇
到变厚度工件, 上表面回波与底波声程发生改变, 上
表面回波与底波极易被闸门捕捉到并作为缺陷波记
录, 干扰检测结果。
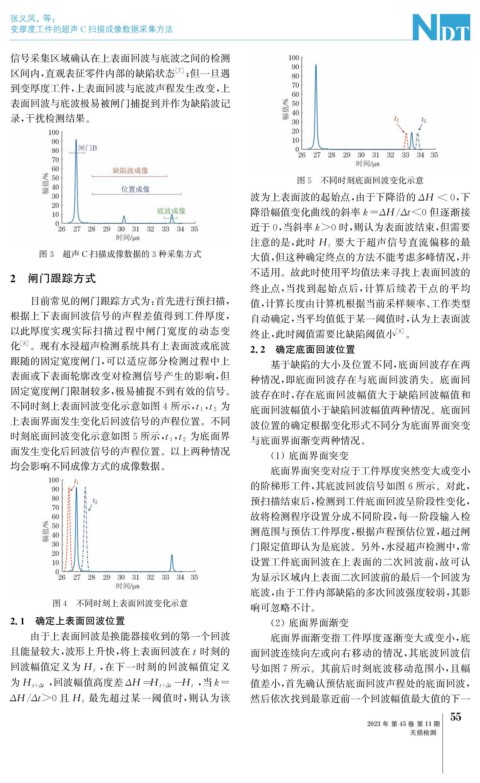
图5 不同时刻底面回波变化示意
波为上表面波的起始点, 由于下降沿的ΔH <0 , 下
降沿幅值变化曲线的斜率k=ΔH / Δt<0但逐渐接
近于0 , 当斜率k>0时, 则认为表面波结束, 但需要
要大于超声信号直流偏移的最
注意的是, 此时 H t
图3 超声 C扫描成像数据的3种采集方式 大值, 但这种确定终点的方法不能考虑多峰情况, 并
不适用。故此时使用平均值法来寻找上表面回波的
2 闸门跟踪方式
终止点, 当找到起始点后, 计算后续若干点的平均
目前常见的闸门跟踪方式为: 首先进行预扫描, 值, 计算长度由计算机根据当前采样频率、 工作类型
根据上下表面回波信号的声程差值得到工件厚度, 自动确定, 当平均值低于某一阈值时, 认为上表面波
以此厚度实现实际扫描过程中闸门宽度的动态变 终止, 此时阈值需要比缺陷阈值小 [ 9 ] 。
化 [ 8 ] 。现有水浸超声检测系统具有上表面波或底波 2.2 确定底面回波位置
跟随的固定宽度闸门, 可以适应部分检测过程中上 基于缺陷的大小及位置不同, 底面回波存在两
表面或下表面轮廓改变对检测信号产生的影响, 但 种情况, 即底面回波存在与底面回波消失。底面回
固定宽度闸门限制较多, 极易捕捉不到有效的信号。 波存在时, 存在底面回波幅值大于缺陷回波幅值和
, 为
不同时刻上表面回波变化示意如图4所示, t 1t 2 底面回波幅值小于缺陷回波幅值两种情况。底面回
上表面界面发生变化后回波信号的声程位置。不同 波位置的确定根据变化形式不同分为底面界面突变
, 为底面界
时刻底面回波变化示意如图5所示, t 1t 2
与底面界面渐变两种情况。
面发生变化后回波信号的声程位置。以上两种情况 ( 1 )底面界面突变
均会影响不同成像方式的成像数据。
底面界面突变对应于工件厚度突然变大或变小
的阶梯形工件, 其底波回波信号如图6所示。对此,
预扫描结束后, 检测到工件底面回波呈阶段性变化,
故将检测程序设置分成不同阶段, 每一阶段输入检
测范围与预估工件厚度, 根据声程预估位置, 超过闸
门限定值即认为是底波。另外, 水浸超声检测中, 常
设置工件底面回波在上表面的二次回波前, 故可认
为显示区域内上表面二次回波前的最后一个回波为
底波, 由于工件内部缺陷的多次回波强度较弱, 其影
图4 不同时刻上表面回波变化示意
响可忽略不计。
2.1 确定上表面回波位置 ( 2 )底面界面渐变
由于上表面回波是换能器接收到的第一个回波 底面界面渐变指工件厚度逐渐变大或变小, 底
且能量较大, 波形上升快, 将上表面回波在 t 时刻的 面回波连续向左或向右移动的情况, 其底波回波信
, 在下一时刻的回波幅值定义 号如图7所示。其前后时刻底波移动范围小, 且幅
回波幅值定义为 H t
, 当 k=
为 H t + Δt , 回波幅值高度差ΔH = H t + Δt- H t 值差小, 首先确认预估底面回波声程处的底面回波,
最先超过某一阈值时, 则认为该 然后依次找到最靠近前一个回波幅值最大值的下一
ΔH / Δt>0且 H t
5
5
2023年 第45卷 第11期
无损检测