
Page 98 - 无损检测2023年第十一期
P. 98
张义凤, 等:
变厚度工件的超声 C扫描成像数据采集方法
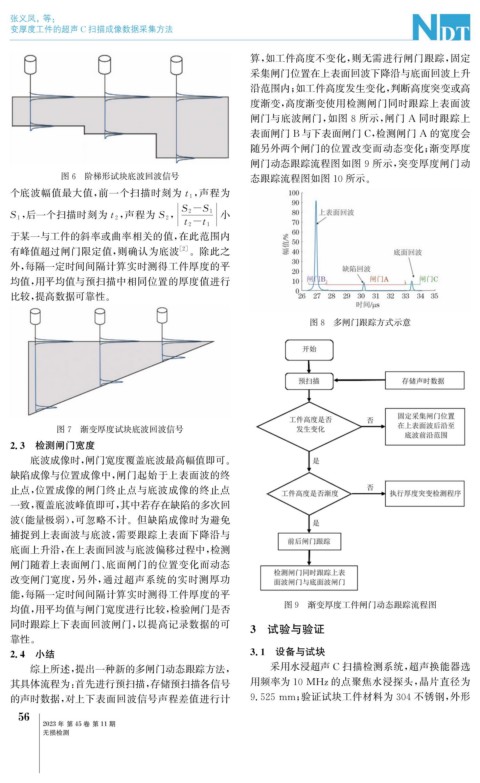
算, 如工件高度不变化, 则无需进行闸门跟踪, 固定
采集闸门位置在上表面回波下降沿与底面回波上升
沿范围内; 如工件高度发生变化, 判断高度突变或高
度渐变, 高度渐变使用检测闸门同时跟踪上表面波
闸门与底波闸门, 如图8所示, 闸门 A 同时跟踪上
表面闸门 B与下表面闸门 C , 检测闸门 A 的宽度会
随另外两个闸门的位置改变而动态变化; 渐变厚度
闸门动态跟踪流程图如图9所示, 突变厚度闸门动
图6 阶梯形试块底波回波信号 态跟踪流程图如图10所示。
, 声程为
个底波幅值最大值, 前一个扫描时刻为t 1
S 2-S 1
, 小
S 1 , 后一个扫描时刻为t 2 , 声程为S 2
t 2-t 1
于某一与工件的斜率或曲率相关的值, 在此范围内
有峰值超过闸门限定值, 则确认为底波 [ 2 ] 。除此之
外, 每隔一定时间间隔计算实时测得工件厚度的平
均值, 用平均值与预扫描中相同位置的厚度值进行
比较, 提高数据可靠性。
图8 多闸门跟踪方式示意
图7 渐变厚度试块底波回波信号
2.3 检测闸门宽度
底波成像时, 闸门宽度覆盖底波最高幅值即可。
缺陷成像与位置成像中, 闸门起始于上表面波的终
止点, 位置成像的闸门终止点与底波成像的终止点
一致, 覆盖底波峰值即可, 其中若存在缺陷的多次回
波( 能量极弱), 可忽略不计。但缺陷成像时为避免
捕捉到上表面波与底波, 需要跟踪上表面下降沿与
底面上升沿, 在上表面回波与底波偏移过程中, 检测
闸门随着上表面闸门、 底面闸门的位置变化而动态
改变闸门宽度, 另外, 通过超声系统的实时测厚功
能, 每隔一定时间间隔计算实时测得工件厚度的平
图9 渐变厚度工件闸门动态跟踪流程图
均值, 用平均值与闸门宽度进行比较, 检验闸门是否
同时跟踪上下表面回波闸门, 以提高记录数据的可
3 试验与验证
靠性。
2.4 小结 3.1 设备与试块
综上所述, 提出一种新的多闸门动态跟踪方法, 采用水浸超声 C 扫描检测系统, 超声换能器选
其具体流程为: 首先进行预扫描, 存储预扫描各信号 用频率为10MHz的点聚焦水浸探头, 晶片直径为
的声时数据, 对上下表面回波信号声程差值进行计 9.525mm ; 验证试块工件材料为304不锈钢, 外形
6
5
2023年 第45卷 第11期
无损检测