
Page 58 - 无损检测2023年第六期
P. 58
吴 昊, 等:
基于三维成像的相控阵超声自动分析技术
的扇扫数据按照真实的扫查位置进行三维重建。直 三维模型中进行不连续信号的识别。
接体绘制算法的核心是设置传输函数, 传输函数的 DBSCAN 密度聚类算法识别的基本原理如下:
输入是数据本身, 输出是影响体绘制的参数, 如颜 ① 首先确定半径 r 和 minPoints ( 最小点), 从一个
色、 不透明度等。通常, 重要特征设置较大的不透明 没有被访问过的任意数据点开始, 判断以此点为中
度, 次要特征设置较小的不透明度。对于表示背景 心, r 为半径的圆内包含的点的数量是否不小于
的标量值、 表示噪声的标量值、 与被表达内容无关的 minPoints , 如果不小于 minPoints则该点被标记
标量值一般被映射为 0 , 表示透明, 以消除这些无关 为central p oint ( 中心点), 反之则会被标记为 noise
值对可视化结果的影响, 其余的标量值应该按其所 p oint ( 噪声点); ② 重复 ① 的步骤, 如果一个 noise
表达的不同含义定义不同的透明度和颜色值。 p oint 存在于某个以central p oint 为半径的圆内, 则
设置不透明度函数, 可在一维的数据值坐标图中 这个 点 被 标 记 为 边 缘 点, 反 之 仍 为 noisep oint 。
画出0~1之间的不透明度曲线。曲线的形状决定体 ③ 重复步骤① , 直到所有点都被访问过。密度聚
绘制显示的特征。颜色可设置控制点, 控制点之间的 类算法原理如图9所示。
颜色通过线性插值得到, 体绘制显示如图7所示。
图9 密度聚类算法原理示意
通过设定阈值范围, 以及密度聚类算法所需的
图7 体绘制显示 MinPts ( 邻域中的最小点数) 和 E PS ( 邻域的最大半
径) 两个参数, 可实现对于焊缝区域内不连续信号的
笔者设计的直接体绘制方法是基于 P y thon接
设置为 5 , 可有效
口的 VTK ( 可视化工具库) 进行的, 使用的是光线投 识别。将 MinPts设置为 15 , E PS
识别出尺寸接近于扫查分辨率的不连续信号, 且响
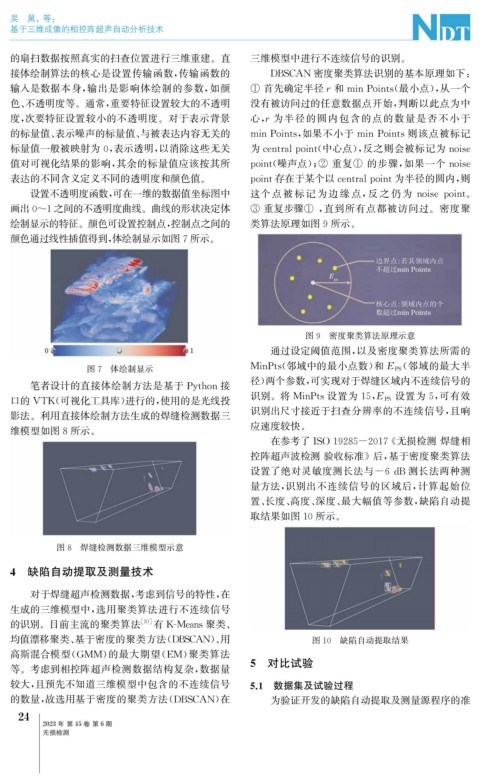
影法。利用直接体绘制方法生成的焊缝检测数据三
应速度较快。
维模型如图8所示。
在参考了ISO19285-2017 《 无损检测 焊缝相
控阵超声波检测 验收标准》后, 基于密度聚类算法
设置了绝对灵敏度测长法与 -6dB 测长法两种测
量方法, 识别出不连续信号的区域后, 计算起始位
置、 长度、 高度、 深度、 最大幅值等参数, 缺陷自动提
取结果如图10所示。
图8 焊缝检测数据三维模型示意
4 缺陷自动提取及测量技术
对于焊缝超声检测数据, 考虑到信号的特性, 在
生成的三维模型中, 选用聚类算法进行不连续信号
的识别。目前主流的聚类算法 [ 10 ] 有 K-Means聚类、
均值漂移聚类、 基于密度的聚类方法( DBSCAN )、 用 图10 缺陷自动提取结果
高斯混合模型( GMM ) 的最大期望( EM ) 聚类算法
等。考虑到相控阵超声检测数据结构复杂, 数据量 5 对比试验
较大, 且预先不知道三维模型中包含的不连续信号 5.1 数据集及试验过程
的数量, 故选用基于密度的聚类方法( DBSCAN ) 在 为验证开发的缺陷自动提取及测量源程序的准
4
2
2023年 第45卷 第6期
无损检测