
Page 78 - 无损检测2023年第四期
P. 78
丁 妍, 等:
基于三次 B样条小波变换和 Cann y 算法的火焰边缘检测算法
在对边缘复杂、 噪声较大的图像进行边缘检测时, 会 1 ∂θ ( x , )
y
ψ = ( 1 )
出现边缘不连续、 定位不准确的情况 [ 7-8 ] 。相较于上 ∂ x
y
述算法, Cann y 算法检测后边缘连续效果更佳, 但算 2 ∂θ ( x , )
ψ = ( 2 )
法本身有一定的局限性, 同时易受噪声干扰 [ 9-11 ] 。 ∂ y
y
针对枪口火焰边缘的检测, 设计了一种基于三 式中: θ ( x , ) 在平面上的积分为1 , 取二维高斯函
数, , 分别为θ ( x , ) 在x 和 y 方向上的偏导
1
2
y
次 B样条小波变化和 Cann y 算法的融合优化算法, ψ ψ
数, 其积分均为0 。
该算法结合了B样条小波变换去噪效果佳与 Cann y
y
f
y
算法边缘连续性好的优点。试验结果表明, 该算法 图像 ( x , ) 小波变换在 x , 方向上的分量分
可以精准定位火焰边缘, 完整地连接火焰边缘, 噪声 别为
x
(
y = f* ψ S x , )
抑制效果更好, 更适合火焰边缘检测。 W S f x , ) x ( y ( 3 )
y
W S f x , ) y ( y ( 4 )
y = f* ψ S x , )
(
1 火焰图像采集系统
y
f* 表示卷积运算; ( x , )
式中: S 为变化尺度; ψ S y
火焰在产生时伴随着光亮, 高速摄像机拍摄火 为尺度为S 时的 ψ ψ S x , ) 为尺度为S 时的 ψ 2 。
x
1
; (
y
焰图像时, 火光透过物镜, 呈现在光电器件的像感面 在此条件下, 梯度方向为
上, 其中受驱动电路控制的光电器件, 会对像感面上 W s f x , )
y
(
y
y =
(
A x f x , ) arctan ( 5 )
x
的火焰图像快速响应, 在各像素点产生响应大小不 W s f x , )
y
(
同的电荷包, 将光信号转化为电信号。带有图像信 模值为
息的各个电荷包被迅速转移到寄存器中, 经信号处 x 2 y 2
(
y =
M x f x , ) W S f x , ) + W S f x , )
(
(
y
y
理后传输至 PC ( 计算机) 端, 然后以 PC 端为中心,
( 6 )
对采集到的火焰图像序列进行分析。 j
j
式中: S 取2 ( ∈Z )。
试验时将高速摄像机摆放至可以清晰拍摄到全 边缘点定义为梯度方向上模值极大的点, 将其
程火焰的位置, PC 端通过触发线与高速摄像机连
连接构成边缘图像。
接, 并采用 USB3160 采集卡连接 PC 端的外部端
2.2 改进的 Cann y 边缘检测算法
口, 系统搭建完成后, 选择手动触发 PC 端触发键,
传统的 Cann y 算法在进行边缘检测时, 其步骤
开始拍摄图像并采集火焰信号。拍摄过程中采用黑
如下: ① 利用高斯滤波器对图像进行平滑去噪;
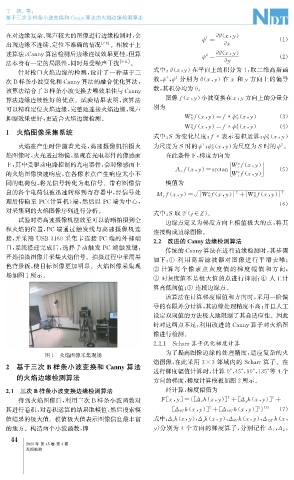
色背景板, 使目标图像更加明显。火焰图像采集现
② 计算每 个 像 素 点 灰 度 值 的 梯 度 幅 值 和 方 向;
场如图1所示。
③ 对灰度值不是极大值的点进行抑制; ④ 人工计
算高低阈值; ⑤ 连接边缘点。
该算法在计算梯度幅值和方向时, 采用一阶偏
导的有限差分计算, 其边缘处理精度不高; 并且人工
设定双阈值的方法极大地限制了其自适应性。因此
针对这两点不足: 利用改进的 Cann y 算子对火焰图
像进行检测。
2.2.1 Scharr算子优化梯度计算
为了提高图像边缘的处理精度, 适应复杂的火
图1 火焰图像采集现场
焰图像, 在此采用 3×3 邻域内的 Scharr算子。在
2 基于三次 B 样条小波变换和 Cann y 算法
进行梯度幅值计算时, 计算0° , 45° , 90° , 135° 等4个
的火焰边缘检测算法
方向的梯度, 梯度计算模板如图2所示。
2.1 三次 B样条小波变换边缘检测算法 经计算, 梯度幅值为
得到火焰图像后, 利用三次 B 样条小波函数对 F [ x , ] {[ Δ x h ( x , )] + Δ y h ( x , )] +
2
2
y =
[
y
y
其进行卷积, 对卷积运算的结果取模值, 然后搜索模 [ Δ 45° h ( x , )] + Δ 135° h ( x , )]} ( 7 )
2
2 1 / 2
[
y
y
值结果的极大值。模值极大值表示图像信息最丰富 式中: Δ x h ( x , ), Δ y h ( x , ), Δ 45° h ( x , ), Δ 135° h ( x ,
y
y
y
的地方。构造两个小波函数, 即 y ) 分别为 4 个方向的梯度算子, 分别记作 Δ 1 Δ 2
, ,
4
4
2023年 第45卷 第4期
无损检测