
Page 98 - 无损检测2022年第八期
P. 98
张小刚,等:
热室内板型乏燃料组件水隙检测系统研发
1 检测原理 2 检测系统组成
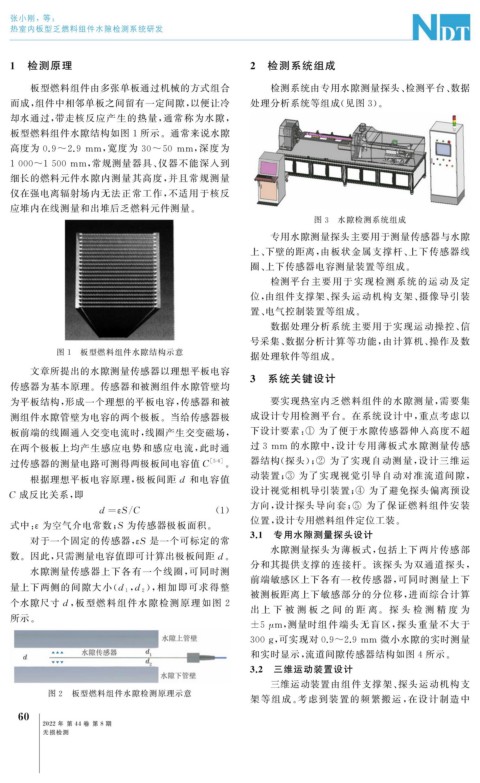
板型燃料组件由多张单板通过机械的方式组合 检测系统由专用水隙测量探头、 检测平台、 数据
而成, 组件中相邻单板之间留有一定间隙, 以便让冷 处理分析系统等组成( 见图 3 )。
却水通过, 带走核反应产生的热量, 通常称为水隙,
板型燃料组件水隙结构如图 1 所示。通常来说水隙
高度为 0.9~2.9 mm , 宽度为 30~50 mm , 深度为
1000~1500mm , 常规测量器具、 仪器不能深入到
细长的燃料元件水隙内测量其高度, 并且常规测量
仪在强电离辐射场内无法正常工作, 不适用于核反
应堆内在线测量和出堆后乏燃料元件测量。
图 3 水隙检测系统组成
专用水隙测量探头主要用于测量传感器与水隙
上、 下壁的距离, 由板状金属支撑杆、 上下传感器线
圈、 上下传感器电容测量装置等组成。
检测平台主要用于实现检测系统的运动及定
位, 由组件支撑架、 探头运动机构支架、 摄像导引装
置、 电气控制装置等组成。
数据处理分析系统主要用于实现运动操控、 信
号采集、 数据分析计算等功能, 由计算机、 操作及数
图 1 板型燃料组件水隙结构示意
据处理软件等组成。
文章所提出的水隙测量传感器以理想平板电容
3 系统关键设计
传感器为基本原理。传感器和被测组件水隙管壁均
为平板结构, 形成一个理想的平板电容, 传感器和被 要实现热室内乏燃料组件的水隙测量, 需要集
测组件水隙管壁为电容的两个极板。当给传感器极 成设计专用检测平台。在系统设计中, 重点考虑以
板前端的线圈通入交变电流时, 线圈产生交变磁场, 下设计要素: ① 为了便于水隙传感器伸入高度不超
在两个极板上均产生感应电势和感应电流, 此时通 过 3mm 的水隙中, 设计专用薄板式水隙测量传感
[ 5-6 ] 器结构( 探头); ② 为了实现自动测量, 设计三维运
过传感器的测量电路可测得两极板间电容值 C 。
根据理想平板电容原理, 极板间距 d 和电容值 动装置; ③ 为了实现视觉引导自动对准流道间隙,
C 成反比关系, 即 设计视觉相机导引装置; ④ 为了避免探头偏离预设
方向, 设计探头导向套; ⑤ 为了保证燃料组件安装
d = εS / C ( 1 )
位置, 设计专用燃料组件定位工装。
式中: ε 为空气介电常数; S 为传感器极板面积。
3.1 专用水隙测量探头设计
对于一个固定的传感器, εS 是一个可标定的常
水隙测量探头为薄板式, 包括上下两片传感部
数。因此, 只需测量电容值即可计算出极板间距d 。
分和其提供支撑的连接杆。该探头为双通道探头,
水隙测量传感器上下各有一个线圈, 可同时测
前端敏感区上下各有一枚传感器, 可同时测量上下
, ), 相加即可求得整
被测板距离上下敏感部分的分位移, 进而综合计算
量上下两侧的间隙大小( d 1 d 2
个水隙尺寸 d , 板型燃料组件水隙检测原理如图 2
出 上 下 被 测 板 之 间 的 距 离。 探 头 检 测 精 度 为
所示。
±5 μ m , 测量时组件端头无盲区, 探头重量不大于
300g 可实现对0.9~2.9mm 微小水隙的实时测量
,
和实时显示, 流道间隙传感器结构如图 4 所示。
3.2 三维运动装置设计
三维运动装置由组件支撑架、 探头运动机构支
图 2 板型燃料组件水隙检测原理示意
架等组成。 考虑到装置的频繁搬运, 在设计制造中
6
0
2022 年 第 44 卷 第 8 期
无损检测