
Page 99 - 无损检测2022年第八期
P. 99
张小刚,等:
热室内板型乏燃料组件水隙检测系统研发
图 4 流道间隙传感器结构示意
将被测组件的支架与探头、 水隙定位对正运动机构
共置于同一变形量极少的铝合金平台上。探头运动
机构与组件支撑架采用活性连接, 使用时, 将探头运
动机构卡于组件支撑架的立柱卡槽上; 不使用时, 可
从卡槽拿下, 放置于其他合适位置。
探头支架在 y z 方向的水隙与探头对正定位
/
/
是由 y z 方向运动机构模组来完成的, 定位时,/ z
y
轴同步运动, 可以高效地完成探头与组件水隙中心
的定位对正。
图 6 四轴运动机构结构示意
探头在x 方向进出水隙的运动则是以高精度
伺服电机为动力, 传动机构通过滚珠丝杠带动滑座
上的探头实现探头的推进进入与收缩拉出, 探头尾
部的连接电缆由拖链辅助行走, 探头 x 方向收缩机
构整体独立。
探头运动支架上配置有一个微型摄像头, 可将
图像信号传输到中心监控屏上, 便于检测人员实时
观察, 视觉对准机构结构如图 5 所示。此外, 探头在
输送轨道上配置有激光开关, 用于探头在推送过程 图 7 视觉相机实物
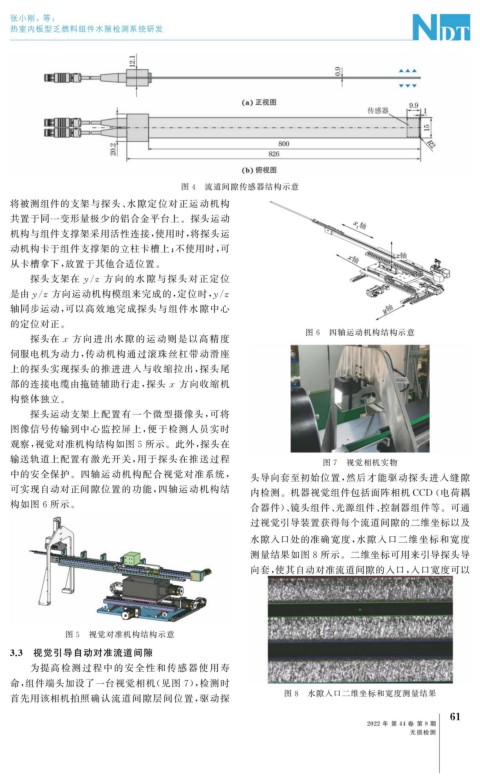
中的安全保护。四轴运动机构配合视觉对准系统, 头导向套至初始位置, 然后才能驱动探头进入缝隙
可实现自动对正间隙位置的功能, 四轴运动机构结 内检测。机器视觉组件包括面阵相机 CCD ( 电荷耦
构如图 6 所示。 合器件)、 镜头组件、 光源组件、 控制器组件等。可通
过视觉引导装置获得每个流道间隙的二维坐标以及
水隙入口处的准确宽度, 水隙入口二维坐标和宽度
测量结果如图 8 所示。二维坐标可用来引导探头导
向套, 使其自动对准流道间隙的入口, 入口宽度可以
图 5 视觉对准机构结构示意
3.3 视觉引导自动对准流道间隙
为提高检测过程中的安全性和传感器 使用寿
命, 组件端头加设了一台视觉相机( 见图 7 ), 检测时
图 8 水隙入口二维坐标和宽度测量结果
首先用该相机拍照确认流道间隙层间位置, 驱动探
1
6
2022 年 第 44 卷 第 8 期
无损检测