
Page 105 - 无损检测2022年第八期
P. 105
邓 聪,等:
人工智能技术在射线检测底片评定系统中的应用
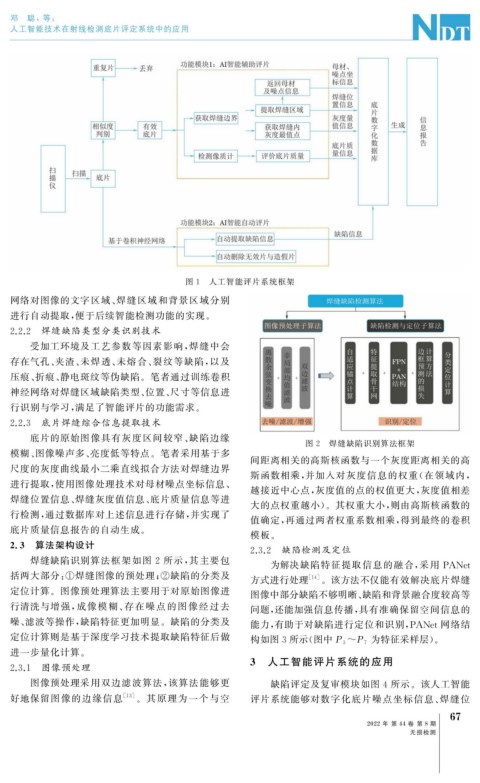
图 1 人工智能评片系统框架
网络对图像的文字区域、 焊缝区域和背景区域分别
进行自动提取, 便于后续智能检测功能的实现。
2.2.2 焊缝缺陷类型分类识别技术
受加工环境及工艺参数等因素影响, 焊缝中会
存在气孔、 夹渣、 未焊透、 未熔合、 裂纹等缺陷, 以及
压痕、 折痕、 静电斑纹等伪缺陷。笔者通过训练卷积
神经网络对焊缝区域缺陷类型、 位置、 尺寸等信息进
行识别与学习, 满足了智能评片的功能需求。
2.2.3 底片焊缝综合信息提取技术
底片的原始图像具有灰度区间较窄、 缺陷边缘
图 2 焊缝缺陷识别算法框架
模糊、 图像噪声多、 亮度低等特点。笔者采用基于多
间距离相关的高斯核函数与一个灰度距离相关的高
尺度的灰度曲线最小二乘直线拟合方法对焊缝边界
斯函数相乘, 并加入对灰度信息的权重( 在领域内,
进行提取, 使用图像处理技术对母材噪点坐标信息、
越接近中心点, 灰度值的点的权值更大, 灰度值相差
焊缝位置信息、 焊缝灰度值信息、 底片质量信息等进
大的点权重越小)。其权重大小, 则由高斯核函数的
行检测, 通过数据库对上述信息进行存储, 并实现了
值确定, 再通过两者权重系数相乘, 得到最终的卷积
底片质量信息报告的自动生成。
模板。
2.3 算法架构设计
2.3.2 缺陷检测及定位
焊缝缺陷识别算法框架如图 2 所示, 其主要包
为解决缺陷特征提取信息的融合, 采用 PANet
括两大部分: ① 焊缝图像的预处理; ② 缺陷的分类及 [ 14 ]
方式进行处理 。该方法不仅能有效解决底片焊缝
定位计算。图像预处理算法主要用于对原始图像进 图像中部分缺陷不够明晰、 缺陷和背景融合度较高等
行清洗与增强, 成像模糊、 存在噪点的图像 经过去 问题, 还能加强信息传播, 具有准确保留空间信息的
噪、 滤波等操作, 缺陷特征更加明显。缺陷的分类及 能力, 有助于对缺陷进行定位和识别, PANet网络结
定位计算则是基于深度学习技术提取缺陷特征后做 为特征采样层)。
构如图3所示( 图中 P 3~P 7
进一步量化计算。
3 人工智能评片系统的应用
2.3.1 图像预处理
图像预处理采用双边滤波算法, 该算法能够更 缺陷评定及复审模块如图 4 所示。该人工智能
好地保留图像的边缘信息 [ 13 ] 。其原理为一个与空 评片系统能够对数字化底片噪点坐标信息、 焊缝位
7
6
2022 年 第 44 卷 第 8 期
无损检测