
Page 64 - 无损检测2022年第三期
P. 64
沈佳园, 等:
小口径漏磁内检测磁化装置的设计与运动分析
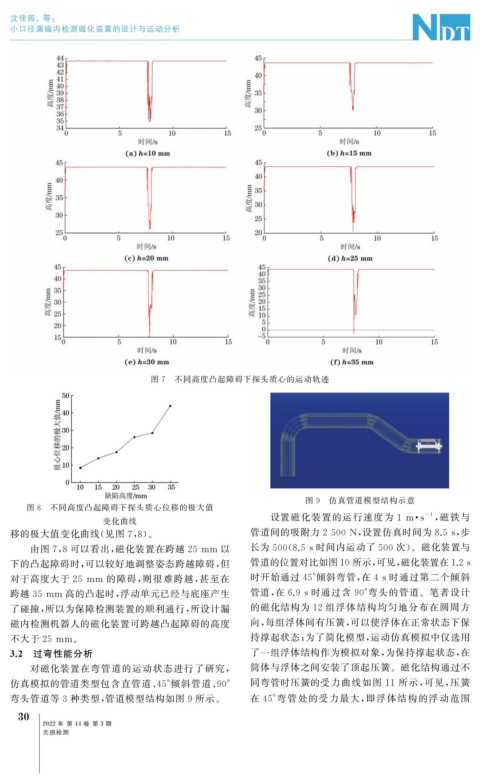
图 7 不同高度凸起障碍下探头质心的运动轨迹
图 9 仿真管道模型结构示意
图 8 不同高度凸起障碍下探头质心位移的极大值
设置磁化装置的运行速度为 1 m · s , 磁铁与
-1
变化曲线
管道间的吸附力 2500N , 设置仿真时间为 8.5s , 步
移的极大值变化曲线( 见图 7 , 8 )。
由图 7 , 8 可以看出, 磁化装置在跨越 25mm 以 长为 500 ( 8.5s时间内运动了 500 次)。磁化装置与
下的凸起障碍时, 可以较好地调整姿态跨越障碍, 但 管道的位置对比如图10所示, 可见, 磁化装置在1.2s
对于高度大于 25 mm 的障碍, 则很难跨越, 甚至在 时开始通过 45° 倾斜弯管, 在 4s时通过第二个倾斜
跨越 35mm 高的凸起时, 浮动单元已经与底座产生 管道, 在 6.9s时通过含 90° 弯头的管道。笔者设计
了碰撞, 所以为保障检测装置的顺利通行, 所设计漏 的磁化结构为 12 组浮体结构均匀地分布在圆周方
磁内检测机器人的磁化装置可跨越凸起障碍的高度 向, 每组浮体间有压簧, 可以使浮体在正常状态下保
不大于 25mm 。 持撑起状态; 为了简化模型, 运动仿真模拟中仅选用
3.2 过弯性能分析 了一组浮体结构作为模拟对象, 为保持撑起状态, 在
对磁化装置在弯管道的运动状态进行了研究, 筒体与浮体之间安装了顶起压簧。磁化结构通过不
同弯管时压簧的受力曲线如图 11 所示, 可见, 压簧
仿真模拟的管道类型包含直管道、 45° 倾斜管道、 90°
弯头管道等 3 种类型, 管道模型结构如图 9 所示。 在 45° 弯管处的受力最大, 即浮体结构的浮动范围
0
3
2022 年 第 44 卷 第 3 期
无损检测