
Page 53 - 无损检测2021年第八期
P. 53
余焕伟, 等:
基于高斯混合 - 隐马尔可夫模型的特种设备敲击检测
借助于智能语音识别技术, 提出一种基于改进的高斯 况。 1 平板试件无缺陷, 2 平板试件底部开孔, 3 #
#
#
混合 - 隐马尔可夫模型( GMM-HMM ) 的敲击检测模 平板试件的边缘至中心设有垂直表面的开裂缺陷,
型, 模拟检测人员从敲击中“ 听出” 缺陷的过程, 并通 4 平板试件一半厚度处设有夹层缺陷, 5 平板试件
#
#
#
#
过试验对模型的有效性和鲁棒性进行验证。 底部的中心减薄, 6 平板试件设有对接焊缝, 7 钢
管试件一半长处设有环向裂纹, 8 钢管试件的端部
#
1 隐马尔可夫语音识别理论
焊缝处设有环向裂纹, 9 钢管试件无缺陷。平板试
#
HMM ( 隐马尔可夫模型) 以概率统计理论为基 件的尺寸均为400mm×400mm×30mm ( 长×宽×
础, 广泛应用于语音识别等多个领域 [ 11-12 ] , 其包含了 高), 无缝钢管试件尺寸( 直径 × 壁厚) 为 50mm×
两个双随机过程, 可用参数{ S , X , Π , A , B } 来描述: 3mm , 长度为 1000 mm ,材料为低碳钢。信号采
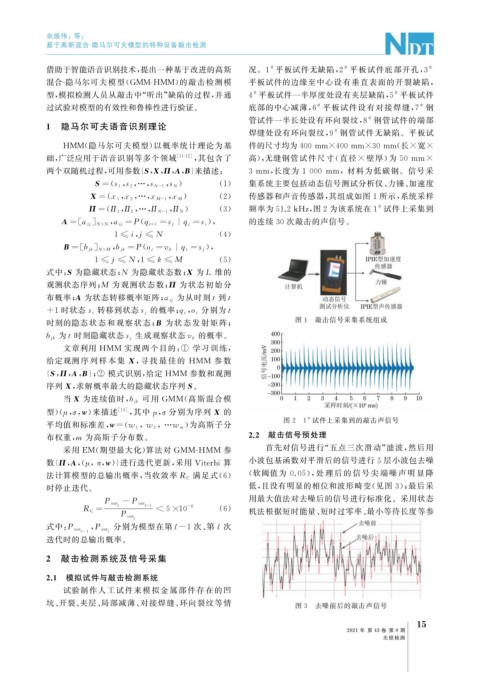
, ) ( 1 ) 集系统主要包括动态信号测试分析仪、 力锤、 加速度
( , ,…, s N- 1 s N
S= s 1 s 2
, ) ( 2 ) 传感器和声音传感器, 其组成如图 1 所示, 系统采样
( , ,…, x M- 1 x M
X = x 1 x 2
#
, ) ( 3 ) 频率为51.2kHz , 图2 为该系统在1 试件上采集到
( , ,…, Π N- 1 Π N
Π = Π 1 Π 2
,
[ ]
A = a i j N× N a i j =P ( ), 的连续 30 次敲击的声信号。
q t + 1 = s j| q t = s i
j ≤ N
1≤i , ( 4 )
[ ] , ),
B = b j k N×M b j k =P ( o t = v k| q t = s j
1≤j ≤ N , 1≤k ≤ M ( 5 )
式中: S 为隐藏状态; N 为隐藏状态数; X 为L 维的
观测状态序列; M 为观测状态数; Π 为状态初始分
为从时刻 t 到 t
布概率; A 为状态转移概率矩阵; a i j
分别为 t
q t
+1 时状态s i 转移到状态 s j 的概率; , o t
图 1 敲击信号采集系统组成
时刻的隐态状态和观察状态; B 为状态发射矩阵;
的概率。
b j k 为 t 时刻隐藏状态 s j 生成观察状态v k
文章利用 HMM 实现两个目的: ① 学习训练,
给定观测 序 列 样 本 集 X , 寻 找 最 佳 的 HMM 参 数
{ S , Π , A , B }; ② 模式识别, 给定 HMM 参数和观测
序列 X , 求解概率最大的隐藏状态序列S 。
可用 GMM ( 高斯混合模
当 X 为连续值时, b j k
型)( , σ , w ) 来描述 [ 13 ] , 其中 μ σ分别为序列 X 的
,
μ
#
图 2 1 试件上采集到的敲击声信号
, ) 为高斯子分
平均值和标准差, w= ( w 1 w 2 ,… w m
2.2 敲击信号预处理
布权重, m 为高斯子分布数。
采用 EM ( 期望最大化) 算法对 GMM-HMM 参 首先对信号进行“ 五点三次滑动” 滤波, 然后用
数{ Π , A ,( , σ , w )} 进行迭代更新, 采用 Viterbi算 小波包基函数对平滑后的信号进行 5 层小波包去噪
μ
( 软阈值为 0.05 ), 处 理 后 的 信 号 尖 端 噪 声 明 显 降
满足式( 6 )
法计算模型的总输出概率, 当收敛率 R C
低, 且没有明显的相位和波形畸变( 见图 3 ); 最后采
时停止迭代。
用最大值法对去噪后的信号进行标准化。采用状态
P out -P out l - 1
l
R C = <5× 10 - 6 ( 6 ) 机法根据短时能量、 短时过零率、 最小等待长度等参
P out
l
分别为模型在第 l-1 次、 第l 次
式中: P out , P out
l-1 l
迭代时的总输出概率。
2 敲击检测系统及信号采集
2.1 模拟试件与敲击检测系统
试验制作人工试件来模拟金属部件存 在的凹
坑、 开裂、 夹层、 局部减薄、 对接焊缝、 环向裂纹等情 图 3 去噪前后的敲击声信号
5
1
2021 年 第 43 卷 第 8 期
无损检测