
Page 74 - 无损检测2021年第三期
P. 74
王 俊, 等:
滨海电厂露天储罐腐蚀损伤检测与结构安全评定
设计厚度为 8mm , 腐蚀裕量为 1.6 mm 。罐壁由 4 1.2.2 智能机器人超声 C 扫描
块钢板对接焊接组成, 罐底由 10 块钢板搭 接焊组 搭载水浸式超声探头的智能 C 扫描机器人是
成, 罐顶由 10 块扇形钢板搭接焊接组成。该罐近年 一种利用超声波的声学特性并结合运动编码信息,
目视检测发现储罐底板涂层出现大面积鼓泡, 局部 通过电脑集成系统对超声信号进行处理分析, 以获
有锈点, 罐壁和罐顶涂层局部破损, 基体腐蚀损伤程 得缺陷在不同深度层面上的二维声学图像的一种先
度未知, 底板下表面腐蚀状况未知。 进检测设备。其采用多元线阵探头实现水平面上
1.2 检测方案 x , 方向的综合扫描。从所显示的二维图像上可
y
通过对储罐内外部环境的腐蚀性进行分析, 结 以直观地看到一定深度层面上缺陷的形状、 位置、 分
合储罐内外壁历史检查结果, 确定腐蚀敏感部位为 布及取向。利用计算机图像处理技术将不同深度层
储罐底板、 罐壁 3m ( 平均液位线附近) 以下区域、 罐 面上的 C 扫描图像进行叠加, 便可以得到缺陷的立
壁 3m 以上局部涂层破损区域以及罐顶局部涂层 体图像、 三维尺寸和空间分布 [ 2 ] 。
破损区域。具体检测方案如下。 智能 C 扫描机器人采用回波差值法去除涂层
( 1 )针对罐顶, 在罐外采用相控阵超声检测仪 对测试结果的影响, 具体做法为, 在回波信号中设置
两个闸门, 第一个闸门设置在一次回波处, 第二个闸
进行检测。
门设置在第二个回波处, 利用闸门间差值方法计算
( 2 )针对罐壁大面积无遮挡部位, 采用搭载水
浸式超声探头的自动爬行机器人进行 C 扫描, 省去 母材厚度。智能 C 扫描机器人检测无需去除涂层,
了搭设脚手架的成本与实施风险, 对于罐壁底部、 人 节省了大量的脚手架搭设的成本和打磨去除涂层的
孔门、 竖梯附近机器人等不可达部位, 采用相控阵超 工作量, 降低了作业风险。
1.2.3 漏磁检测
声检测仪进行补充检测。
( 3 )针对罐底, 在罐内采用漏磁检测仪进行检 漏磁检测的原理是通过外加磁场对铁磁性钢板
测, 对检测出的异常部位采用相控阵超声检测仪进 进行磁化, 如果被磁化的钢板表面或内部存在不连
续或缺陷, 则会有一部分磁力线从缺陷位置附近溢
行复验。
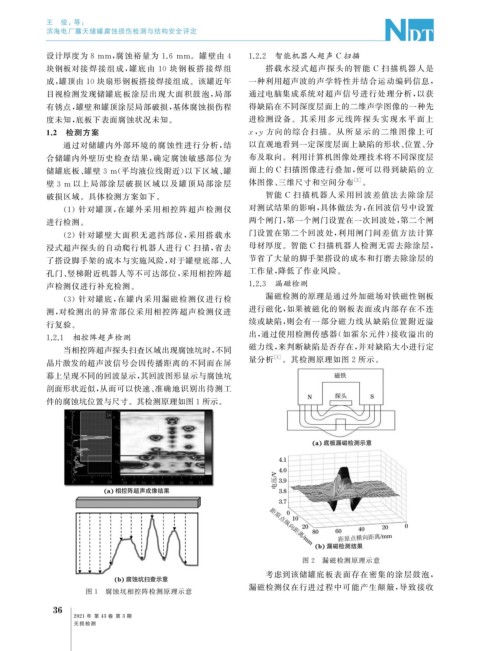
1.2.1 相控阵超声检测 出, 通过使用检测传感器( 如霍尔元件) 接收溢出的
磁力线, 来判断缺陷是否存在, 并对缺陷大小进行定
当相控阵超声探头扫查区域出现腐蚀坑时, 不同
量分析 [ 3 ] 。其检测原理如图 2 所示。
晶片激发的超声波信号会因传播距离的不同而在屏
幕上呈现不同的回波显示, 其回波图形显示与腐蚀坑
剖面形状近似, 从而可以快速、 准确地识别出待测工
件的腐蚀坑位置与尺寸。其检测原理如图1所示。
图 2 漏磁检测原理示意
考虑到该储罐底板表面存在密集的涂层鼓泡,
漏磁检测仪在行进过程中可能产生颠簸, 导致接收
图 1 腐蚀坑相控阵检测原理示意
3
6
2021 年 第 43 卷 第 3 期
无损检测