
Page 75 - 无损检测2021年第三期
P. 75
王 俊, 等:
滨海电厂露天储罐腐蚀损伤检测与结构安全评定
到的磁通量发生波动, 从而带来检测误差。为了解
决上述问题, 考虑在检测实施前对底板整体铺设具
有一定强 度 和 厚 度 的 透 明 塑 料 板, 塑 料 板 厚 度 为
1mm , 铺设后对漏磁检测仪进行重新标定以消除塑
料板对检测精度带来的影响。
2 检测结果
2.1 罐顶相控阵超声检测结果
选用型号为 MentorUT 的相控阵超声检测仪
对罐顶进行相控阵超声检测, 探头型号为 115-100-
020 , 晶片组数为 32 , 频率为 5.0 MHz , 超声波类型
-1
选择纵波, 声速为 5900m · s , 增益为 39dB 。
在罐外对罐顶局部涂层破损区域进行相控阵
超声检 测, 检 测 识 别 出 一 处 腐 蚀 坑, 减 薄 深 度 为
1.75mm , 腐蚀坑直径约15mm 。该腐蚀坑相控阵
检测结果 如 图 3 所 示, 图 像 凸 起 形 状 即 为 腐 蚀 坑
图 4 罐壁腐蚀坑 C 扫图像及其 3D 形貌
截面轮廓。
25 个扫描区域中。
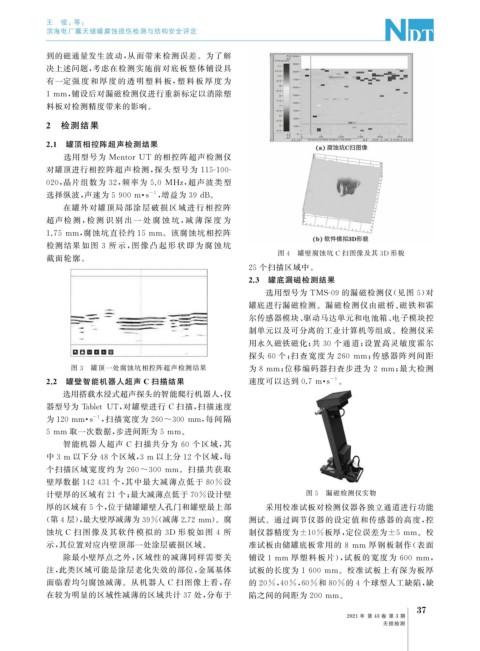
2.3 罐底漏磁检测结果
选用型号为 TMS-09 的漏磁检测仪( 见图 5 ) 对
罐底进行漏磁检测。漏磁检测仪由磁桥、 磁铁和霍
尔传感器模块、 驱动马达单元和电池箱、 电子模块控
制单元以及可分离的工业计算机等组成。检测仪采
用永久磁铁磁化; 共 30 个通道; 设置高灵敏度霍尔
探头 60 个; 扫查宽度为 260 mm ; 传感器阵列间距
图 3 罐顶一处腐蚀坑相控阵超声检测结果 为 8mm ; 位移编码器扫查步进为 2mm ; 最大检测
2.2 罐壁智能机器人超声 C 扫描结果 速度可以达到 0.7m · s 。
-1
选用搭载水浸式超声探头的智能爬行机器人, 仪
器型号为 Tablet UT , 对罐壁进行 C 扫描, 扫描速度
为120mm · s , 扫描宽度为 260~300mm , 每间隔
-1
5mm 取一次数据, 步进间距为 5mm 。
智能机器人超声 C 扫描共分为 60 个区域, 其
中3m 以下分48 个区域, 3m 以上分12 个区域, 每
个扫描区域宽度约为 260~300 mm 。扫描共获取
壁厚数据 142431 个, 其中最大减薄点低于 80% 设
计壁厚的区域有 21 个; 最大减薄点低于70%设计壁 图 5 漏磁检测仪实物
厚的区域有5个, 位于储罐罐壁人孔门和罐壁最上部 采用校准试板对检测仪器各独立通道进行功能
( 第4层), 最大壁厚减薄为39% ( 减薄2.72mm )。腐 测试。通过调节仪器的设定值和传感器的高度, 控
蚀坑 C 扫图像及其软件模拟的 3D 形貌如图 4 所 制仪器精度为 ±10% 板厚, 定位误差为 ±5mm 。校
示, 其位置对应内壁顶部一处涂层破损区域。 准试板由储罐底板常用的 8 mm 厚钢板制作( 表面
除最小壁厚点之外, 区域性的减薄同样需要关 铺设 1mm 厚塑料板片), 试板的宽度为 600 mm ,
注, 此类区域可能是涂层老化失效的部位, 金属基体 试板的长度为 1600mm 。校准试板上有深为板厚
面临着均匀腐蚀减薄。从机器人 C 扫图像上看, 存 的 20% , 40% , 60% 和 80% 的 4 个球型人工缺陷, 缺
在较为明显的区域性减薄的区域共计 37 处, 分布于 陷之间的间距为 200mm 。
7
3
2021 年 第 43 卷 第 3 期
无损检测