
Page 45 - 无损检测2021年第三期
P. 45
唐 涛, 等:
基于相位测量轮廓术的车轮踏面三维轮廓测量
图 2 改进枝切法流程图
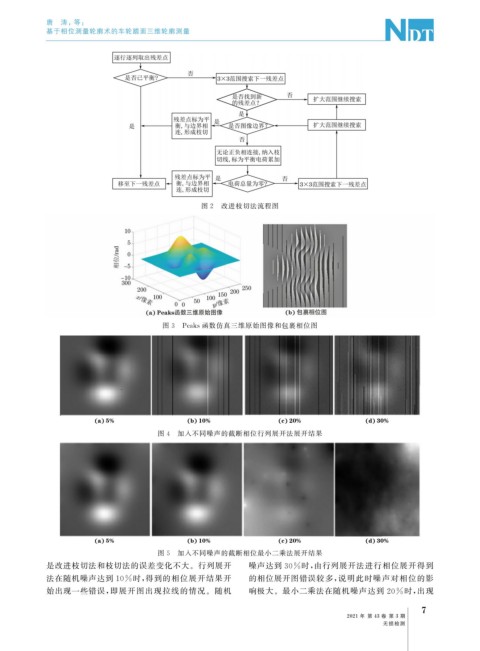
图 3 Peaks函数仿真三维原始图像和包裹相位图
图 4 加入不同噪声的截断相位行列展开法展开结果
图 5 加入不同噪声的截断相位最小二乘法展开结果
是改进枝切法和枝切法的误差变化不大。行列展开 噪声达到 30% 时, 由行列展开法进行相位展开得到
法在随机噪声达到 10% 时, 得到的相位展开结果开 的相位展开图错误较多, 说明此时噪声对相位的影
始出现一些错误, 即展开图出现拉线的情况。随机 响极大。最小二乘法在随机噪声达到 20% 时, 出现
7
2021 年 第 43 卷 第 3 期
无损检测