
Page 44 - 无损检测2021年第三期
P. 44
唐 涛, 等:
基于相位测量轮廓术的车轮踏面三维轮廓测量
轮廓术( PMP ) 是三维传感测量技术中的重要组成 2 [ I 2 x 1 y 1 -I 4 x 1 y 1
( , )]
( , )
ϕ =arctan ( , )
sin ϕ 0
部分, 其因 测 量 精 度 高 而 得 到 了 广 泛 关 注。 该 方 2 I 3 x 1 y 1 -I 1 x 1 y 1 -I 5 x 1 y 1
( , )
( , )
法采用数字投影仪将计算机生成的相移光栅投影 ( 2 )
到车轮踏 面 上, 获 取 变 形 条 纹 的 空 间 信 息 和 一 个 其中
条纹周期 内 相 移 条 纹 的 信 息, 完 成 车 轮 踏 面 的 重 ( , ) ( , ) 2
I 1 x 1 y 1 -I 5 x 1 y 1
sin ϕ 0 = 1-
2 [ I 2 x 1 y 1 -I 4 x 1 y 1
构。相位测 量 轮 廓 术 测 量 大 尺 寸 物 体 时, 需 要 结 ( , ) ( , )]
合图像拼接和数据融合技术 [ 9-10 ] , 来解决视场界限 ( 3 )
限制的问题。笔者采用的是 Stoilov相移 算法 [ 11 ] , 由于式( 2 ) 是一个反正切函数, 被截断在 -π
ϕ
采集 5 帧 车 轮 踏 面 变 形 条 纹 图 像, 并 且 使 用 枝 切 到 +π 之间, 而被测物体的实际相位应该是连续的,
法来进行 相 位 展 开 [ 12-13 ] , 重 建 车 轮 踏 面 的 三 维 面 故需要利用相位展开算法来展开包裹相位。
y
型, 并且对车轮表面的人工缺陷进行了复原。 解包后的相位可以表示为 Ψ ( x , ), 被测量物
体的高度可以表示为 h ( x , ), 物体相位 - 高度关系
y
1 基本原理
式为
1.1 相位测量轮廓术 1
y +
y =
h ( x , ) a ( x , ) b ( x , ) +
y
y
相位测量轮廓术是利用投影标准光栅条纹对待 Ψ ( x , )
测物体进行空间相位调制, 再通过 CCD ( 电荷耦合 1
c ( x , ) 2 ( 4 )
y
y
器件) 摄像机捕获 5 幅变形光栅条纹图案。采用相 Ψ ( x , )
式中: 系数a ( x , ), b ( x , ), c ( x , ) 可以通过系统
移算法获取包裹相位, 再通过相位展开算法获得展 y y y
开相位, 利用相位 - 高度映射关系, 完成对待测物体 校准得到。
1.2 改进枝切法
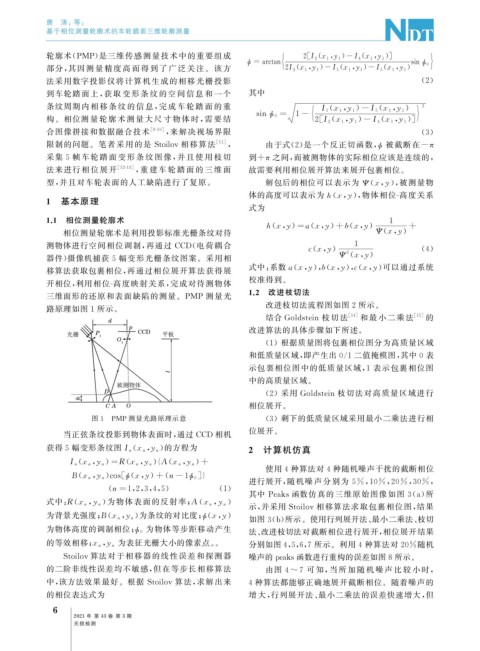
三维面形的还原和表面缺陷的测量。 PMP 测量光
改进枝切法流程图如图 2 所示。
路原理如图 1 所示。
结合 Goldstein 枝 切 法 [ 14 ] 和 最 小 二 乘 法 [ 15 ] 的
改进算法的具体步骤如下所述。
( 1 )根据质量图将包裹相位图分为高质量区域
和低质量区域, 即产生出 0 / 1 二值掩模图, 其中 0 表
示包裏相位图中的低质量区域, 1 表示包裹相位图
中的高质量区域。
( 2 )采用 Goldstein 枝切法对高质量区域进行
相位展开。
图 1 PMP 测量光路原理示意 ( 3 )剩下的低质量区域采用最小二乘法进行相
当正弦条纹投影到物体表面时, 通过 CCD 相机 位展开。
( , ) 的方程为
获得 5 幅变形条纹图I n x n y n 2 计算机仿真
( , )
, )
I n x n y n =R ( x n y n A ( x n y n +
, ){
使用 4 种算法对 4 种随机噪声干扰的截断相位
y +
, ) ]}
ϕ
B ( x n y n cos [ ( x , ) ( n-1 ϕ 0
进行展开, 随机噪声分别为 5% , 10% , 20% , 30% ,
( n= 1 , 2 , 3 , 4 , 5 ) ( 1 )
其中 Peaks函数仿真的三维原始图像如图 3 ( a ) 所
, )
式中: R ( x n y n
示, 并采用 Stoilov 相移算法求取包裹相位图, 结果
, ) 为物体表面的反射率; A ( x n y n
, ) 为条纹的对比度; ( x , )
为背景光强度; B ( x n y n ϕ y 如图 3 ( b ) 所示。使用行列展开法、 最小二乘法、 枝切
为物体高度的调制相位; 为物体等步距移动产生 法、 改进枝切法对截断相位进行展开, 相位展开结果
ϕ 0
, 为表征光栅大小的像素点。。
的等效相移; x n y n 分别如图4 , 5 , 6 , 7 所示。利用 4 种算法对 20% 随机
Stoilov算法对于相移器的线性误差和探测器 噪声的 p eaks函数进行重构的误差如图8所示。
的二阶非线性误差均不敏感, 但在等步长相移算法 由图 4~7 可 知, 当 所 加 随 机 噪 声 比 较 小 时,
中, 该方法效果最好。根据 Stoilov 算法, 求解出来 4 种算法都能够正确地展开截断相位。随着噪声的
的相位表达式为 增 大, 行列展开法、 最小二乘法的误差快速增大, 但
6
2021 年 第 43 卷 第 3 期
无损检测