
Page 93 - 无损检测2024年第七期
P. 93
胡肖肖,等:
基于 B-YOLOv5 的轻量化裂缝检测算法
波变换法的裂纹识别,该方法能够在去除噪声的同 凹坑和细小裂纹的检测,存在一定的局限性。
时,增强裂缝边缘检测的效果。但由于路面背景复 因此,文章针对现有公路缺陷检测模型的特征
杂,环境干扰因素众多,传统的图像处理方法鲁棒性 提取不完善等问题,提出了一种基于YOLOv5算法
差,不能适应不同的环境,导致公路路面病害检测 的增强特征提取的轻量级目标检测算法。
过程中常常出现漏检、误检等现象,且检测准确率
1 算法框架的搭建
低下。
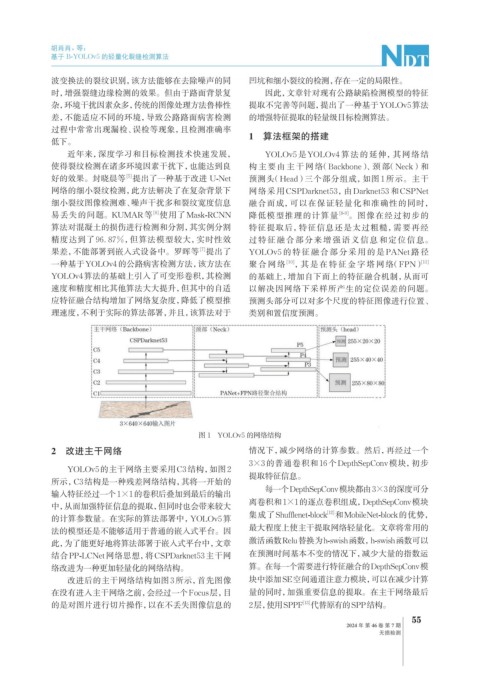
近年来,深度学习和目标检测技术快速发展, YOLOv5 是YOLOv4 算法的延伸,其网络结
使得裂纹检测在诸多环境因素干扰下,也能达到良 构主要由主干网络(Backbone)、颈 部(Neck)和
[5]
好的效果。封晓晨等 提出了一种基于改进 U-Net 预测头(Head)三个部分组成,如图 1 所示。主干
网络的细小裂纹检测,此方法解决了在复杂背景下 网络采用 CSPDarknet53,由 Darknet53 和 CSPNet
细小裂纹图像检测难、噪声干扰多和裂纹宽度信息 融合而成,可以在保证轻量化和准确性的同时,
[6]
易丢失的问题。KUMAR等 使用了Mask-RCNN 降低模型推理的计算量 [8-9] 。图像在经过初步的
算法对混凝土的损伤进行检测和分割,其实例分割 特征提取后,特征信息还是太过粗糙,需要再经
精度达到了 96. 87%,但算法模型较大,实时性效 过特征融合部分来增强语义信息和定位信息。
[7]
果差,不能部署到嵌入式设备中。罗晖等 提出了 YOLOv5 的特征融合部分采用的是 PANet 路径
一种基于YOLOv4的公路病害检测方法,该方法在 聚合网络 [10] ,其是在特征金字塔网络(FPN)
[11]
YOLOv4算法的基础上引入了可变形卷积,其检测 的基础上,增加自下而上的特征融合机制,从而可
速度和精度相比其他算法大大提升,但其中的自适 以解决因网络下采样所产生的定位误差的问题。
应特征融合结构增加了网络复杂度,降低了模型推 预测头部分可以对多个尺度的特征图像进行位置、
理速度,不利于实际的算法部署,并且,该算法对于 类别和置信度预测。
图 1 YOLOv5 的网络结构
2 改进主干网络 情况下,减少网络的计算参数。然后,再经过一个
3×3 的普通卷积和 16 个DepthSepConv模块,初步
YOLOv5的主干网络主要采用C3结构,如图2
提取特征信息。
所示,C3结构是一种残差网络结构,其将一开始的
每一个DepthSepConv模块都由3×3的深度可分
输入特征经过一个1×1的卷积后叠加到最后的输出
离卷积和1×1的逐点卷积组成,DepthSepConv模块
中,从而加强特征信息的提取,但同时也会带来较大
集成了Shufflenet-block 和MobileNet-block的优势,
[12]
的计算参数量。在实际的算法部署中,YOLOv5算
最大程度上使主干提取网络轻量化。文章将常用的
法的模型还是不能够适用于普通的嵌入式平台。因
此,为了能更好地将算法部署于嵌入式平台中,文章 激活函数Relu替换为h-swish函数,h-swish函数可以
结合PP-LCNet网络思想,将CSPDarknet53主干网 在预测时间基本不变的情况下,减少大量的指数运
络改进为一种更加轻量化的网络结构。 算。在每一个需要进行特征融合的DepthSepConv模
改进后的主干网络结构如图3所示,首先图像 块中添加SE空间通道注意力模块,可以在减少计算
在没有进入主干网络之前,会经过一个Focus层,目 量的同时,加强重要信息的提取。在主干网络最后
的是对图片进行切片操作,以在不丢失图像信息的 2层, 使用SPPF 代替原有的SPP结构。
[13]
55
2024 年 第 46 卷 第 7 期
无损检测