
Page 50 - 无损检测2024年第七期
P. 50
郑赛春,等:
管型核燃料元件芯体定位检测系统
图 9 管型燃料元件射线扫描过程示意
图 10 芯体的射线扫描过程示意
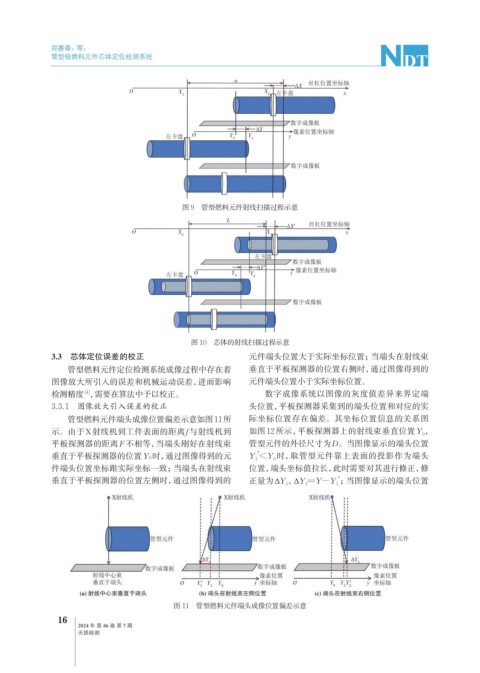
3.3 芯体定位误差的校正 元件端头位置大于实际坐标位置;当端头在射线束
管型燃料元件定位检测系统成像过程中存在着 垂直于平板探测器的位置右侧时,通过图像得到的
图像放大所引入的误差和机械运动误差,进而影响 元件端头位置小于实际坐标位置。
[4]
检测精度 ,需要在算法中予以校正。 数字成像系统以图像的灰度值差异来界定端
3.3.1 图像放大引入误差的校正 头位置,平板探测器采集到的端头位置和对应的实
管型燃料元件端头成像位置偏差示意如图11所 际坐标位置存在偏差。其坐标位置信息的关系图
示。由于X射线机到工件表面的距离f与射线机到 如图12所示,平板探测器上的射线束垂直位置Y ,
0
平板探测器的距离F不相等,当端头刚好在射线束 管型元件的外径尺寸为D。当图像显示的端头位置
垂直于平板探测器的位置Y0时,通过图像得到的元 Y '<Y 时,取管型元件靠上表面的投影作为端头
1
0
件端头位置坐标跟实际坐标一致;当端头在射线束 位置,端头坐标值拉长,此时需要对其进行修正,修
垂直于平板探测器的位置左侧时,通过图像得到的 正量为∆Y ,∆Y =Y-Y ';当图像显示的端头位置
1 1 1
图 11 管型燃料元件端头成像位置偏差示意
16
2024 年 第 46 卷 第 7 期
无损检测