
Page 96 - 无损检测2024年第六期
P. 96
李沛东 :
基于点云数据实时配准算法的桥梁结构复杂缺陷形态识别
图 5 去噪处理前后三维点云数据离散度图
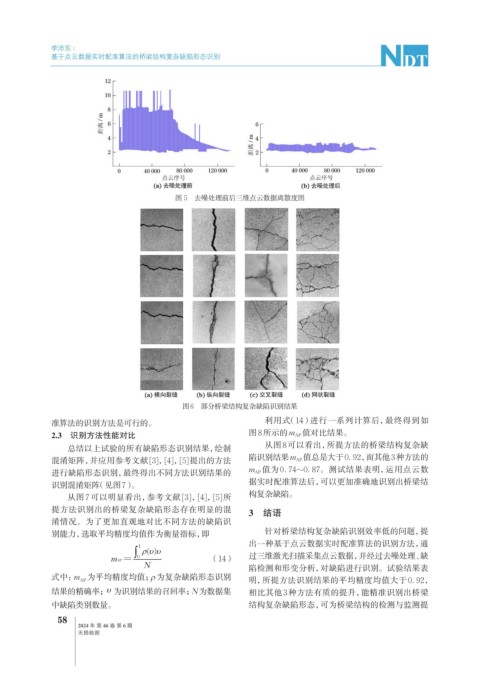
图6 部分桥梁结构复杂缺陷识别结果
准算法的识别方法是可行的。 利用式(14)进行一系列计算后,最终得到如
2.3 识别方法性能对比 图8所示的m AP 值对比结果。
总结以上试验的所有缺陷形态识别结果,绘制 从图8可以看出,所提方法的桥梁结构复杂缺
陷识别结果m AP 值总是大于0. 92,而其他3种方法的
混淆矩阵,并应用参考文献[3],[4],[5]提出的方法
进行缺陷形态识别,最终得出不同方法识别结果的 m AP 值为 0. 74~0. 87。测试结果表明,运用点云数
识别混淆矩阵(见图7)。 据实时配准算法后,可以更加准确地识别出桥梁结
从图 7 可以明显看出,参考文献[3],[4],[5]所 构复杂缺陷。
提方法识别出的桥梁复杂缺陷形态存在明显的混 3 结语
淆情况。为了更加直观地对比不同方法的缺陷识
别能力,选取平均精度均值作为衡量指标,即 针对桥梁结构复杂缺陷识别效率低的问题,提
出一种基于点云数据实时配准算法的识别方法,通
0 ∫ ρυ
1
()υ
m AP = (14) 过三维激光扫描采集点云数据,并经过去噪处理、缺
N 陷检测和形变分析,对缺陷进行识别。试验结果表
式中:m 为平均精度均值; ρ 为复杂缺陷形态识别
AP 明,所提方法识别结果的平均精度均值大于0. 92,
υ
结果的精确率; 为识别结果的召回率; N为数据集 相比其他3种方法有质的提升,能精准识别出桥梁
中缺陷类别数量。 结构复杂缺陷形态,可为桥梁结构的检测与监测提
58
2024 年 第 46 卷 第 6 期
无损检测