
Page 93 - 无损检测2024年第六期
P. 93
李沛东 :
基于点云数据实时配准算法的桥梁结构复杂缺陷形态识别
结构的安全 。为了避免桥梁垮塌事故发生,需要
[2]
及时检测桥梁结构复杂缺陷、识别出具体的缺陷形
态,并给出对应的桥梁养护策略。因此,有必要开发
出一种高质量的桥梁结构复杂缺陷形态识别方法,
并将其应用于桥梁管理养护工作中。
巫生平等 采集了桥梁结构的位移响应数据,
[3]
并计算出位移响应均值作为损伤特征函数,然后基
于样本数据绘制位移均值曲线,在曲率归一化处理
后推算出相邻测点的平均曲率差,从而判断出结构
[4]
的损伤状态,但该方法识别准确率较低。宋超 以
长短时记忆递归网络为基础,建立一种桥梁结构缺
陷识别模型。该方法将桥梁动态测试数据输入模型 图 1 基于激光扫描的三维点云数据采集过程示意
中,提取数据特征,基于此识别出具体的缺陷状态, 据中包含的噪声可能会干扰缺陷识别结果,故需要
[5]
但其抗噪性能较差。钟玉琪等 采集了不同荷载条 经过去噪处理再进行复杂缺陷的检测和识别。
件下的桥梁结构响应数据,通过移动主成分分析算 1.2 建立点云数据去噪处理方案
法对响应数据进行特征挖掘,获取第一特征向量并 以桥梁结构三维点云数据为目标,采用基于密
输入基于机器学习的缺陷形态识别模型中,即可得 度的聚类算法(DBSCAN)进行聚类分割处理,筛选
到结构损伤识别结果,但该方法计算复杂度较高。 出最大数量的聚类结果并将其保留,达到处理点云
从上述研究成果可以看出,目前尚缺少高质量 数据噪声的效果。为了避免出现全局参数选取不合
的桥梁结构复杂缺陷形态识别方法。为此,笔者提 理导致聚类效果较差的情况,在去噪过程中引入自
出一种基于点云数据实时配准算法的新型识别方 动计算半径阈值、最小邻域点个数阈值,来控制全局
[8]
法,以准确检测桥梁结构的损伤状态。 参数的调整 。
实际操作过程中,针对所有的三维点云数据,两
1 桥梁结构复杂缺陷形态识别方法设计
两分别进行间隔距离计算,在遍历所有点云数据后,
1.1 采集桥梁结构三维点云数据 通过式(2),(3)统计出最大间隔距离、最小间隔距
依托于激光扫描仪、传感器等设备开展激光三 离,即
v
v
角测量,获取桥梁结构相关的三维点云数据 ,作为 τ = max τ ( , ) , = 1,2,3, ,N (2)
c
[6]
max
复杂缺陷形态识别的基础。先采用激光扫描仪对目
v
c
v
τ = min τ ( , ) , = 1,2,3, ,N (3)
标结构发射激光,并通过传感器采集反射回的光线, min
并将二者之间的差值表示为
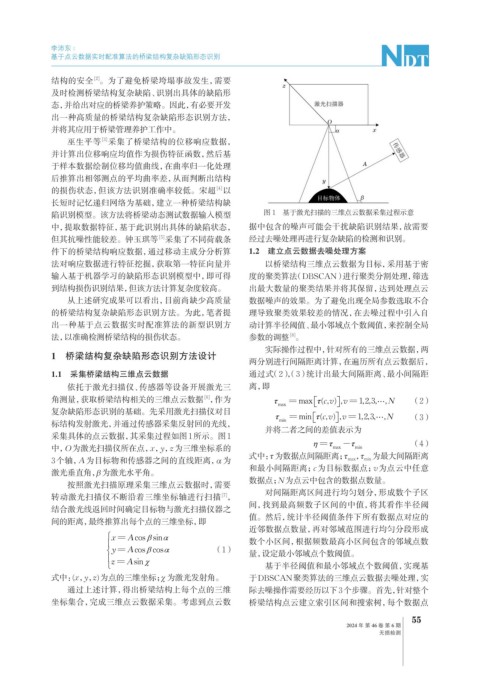
采集具体的点云数据,其采集过程如图1所示。图1
= η -τ τ (4)
中, O为激光扫描仪所在点, x, y, z为三维坐标系的 max min
3个轴, A为目标物和传感器之间的直线距离, α 为 式中: τ 为数据点间隔距离;τ max ,τ min 为最大间隔距离
和最小间隔距离;c为目标数据点;v为点云中任意
激光垂直角, β 为激光水平角。
数据点;N为点云中包含的数据点数量。
按照激光扫描原理采集三维点云数据时,需要
对间隔距离区间进行均匀划分,形成数个子区
转动激光扫描仪不断沿着三维坐标轴进行扫描 ,
[7]
间,找到最高频数子区间的中值,将其看作半径阈
结合激光线返回时间确定目标物与激光扫描仪器之
值。然后,统计半径阈值条件下所有数据点对应的
间的距离,最终推算出每个点的三维坐标,即
近邻数据点数量,再对邻域范围进行均匀分段形成
x = A cos sin α
β
数个小区间,根据频数最高小区间包含的邻域点数
β
α
y = A cos cos (1) 量,设定最小邻域点个数阈值。
z = A sin χ
基于半径阈值和最小邻域点个数阈值,实现基
式中:x, y, z)为点的三维坐标; χ 为激光发射角。 于DBSCAN聚类算法的三维点云数据去噪处理,实
(
通过上述计算,得出桥梁结构上每个点的三维 际去噪操作需要经历以下3个步骤。首先, 针对整个
坐标集合,完成三维点云数据采集。考虑到点云数 桥梁结构点云建立索引区间和搜索树,每个数据点
55
2024 年 第 46 卷 第 6 期
无损检测