
Page 94 - 无损检测2024年第六期
P. 94
李沛东 :
基于点云数据实时配准算法的桥梁结构复杂缺陷形态识别
分别充当一次搜索中心,根据半径阈值设置合理的 l 为数据点变换后的距离差;φ 为给定的判断阈值。
ε
搜索半径实现点云数据的近邻搜索,当搜索出的近 通过搜索最小距离误差和,找到最优刚性变换
邻点数量超过最小邻域点个数阈值,则可以将该搜 矩阵后,这两个点就属于粗配准的数据点。随后,进
索点标注为核心点,此时该点属于未聚类状态。然 入精配准阶段,采用改进的ICP(基于最小二乘法的
后,从多个核心点中任选其一,与其他核心点相连接 最优配准方法)方法不断进行迭代分析,找到最匹
得到连接路径,将该路径上核心点半径阈值范围内 配的原点云和目标点云数据 [10] 。实际操作过程中,
的所有数据点看作一个聚类,该核心点属于已聚类 将源点云和目标点云分别设置为
状态。最后,按照上述操作重复对所有处于未聚类 P = P p ∈ λ 3 , = 1,2,3, ,m }
i
i
{ i
{
状态的核心点进行聚类操作,直到所有核心点都完 Q = Qq ∈ λ 3 , = 1,2,3, ,n } (6)
j
成聚类,删除其中聚类数量较小的集合,即完成桥梁 j j
式中:P为标准点云集合;Q为桥梁结构三维点云集
结构三维点云数据去噪处理。
j
i
1.3 基于点云数据实时配准算法检测结构复杂缺陷 合;,为数据点编号;p,q分别为标准点云和桥梁结
构三维点云集合中的特征点; λ 为特征点集合;m为
对去噪处理后的桥梁结构三维点云数据进行实
标准点云中的数据点数量;n为桥梁结构三维点云中
时配准,需要经历粗配准和精配准两个环节 。在
[9]
的数据点数量。
配准处理之前,获取点云中所有数据点的法向量、邻
提前设置一个最大迭代次数,用来控制点云精配
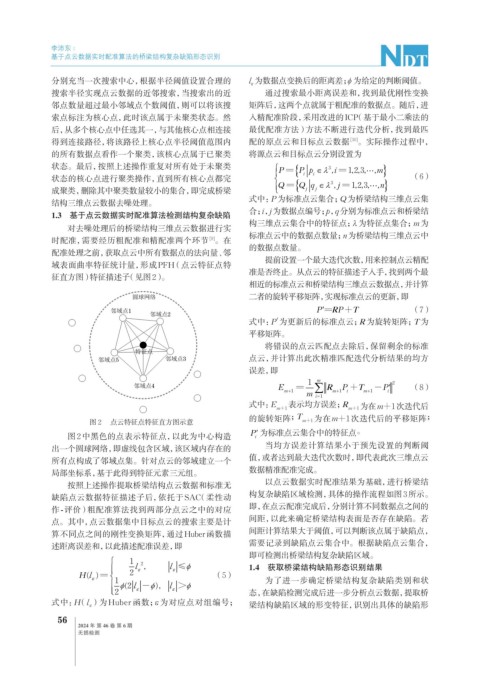
域表面曲率特征统计量,形成PFH (点云特征点特
准是否终止。从点云的特征描述子入手,找到两个最
征直方图)特征描述子(见图2)。
相近的标准点云和桥梁结构三维点云数据点,并计算
二者的旋转平移矩阵,实现标准点云的更新,即
= P′ R + P T (7)
式中:P'为更新后的标准点云;R为旋转矩阵;T为
平移矩阵。
将错误的点云匹配点去除后,保留剩余的标准
点云,并计算出此次精准匹配迭代分析结果的均方
误差,即
= E 1 m 1 ∑ P + R -T P′ (8)
2
m+ 1 m i= 1 m+ i m+ 1 i
式中:E 表示均方误差;R m+1 为在m+1次迭代后
m+1
的旋转矩阵 ;T m+1 为在m+1次迭代后的平移矩阵 ;
图 2 点云特征点特征直方图示意
P′ 为标准点云集合中的特征点 。
图2中黑色的点表示特征点,以此为中心构造 i
出一个圆球网络,即虚线包含区域,该区域内存在的 当均方误差计算结果小于预先设置的判断阈
所有点构成了邻域点集。针对点云的邻域建立一个 值,或者达到最大迭代次数时,即代表此次三维点云
数据精准配准完成。
局部坐标系,基于此得到特征元素三元组。
按照上述操作提取桥梁结构点云数据和标准无 以点云数据实时配准结果为基础,进行桥梁结
缺陷点云数据特征描述子后,依托于SAC(柔性动 构复杂缺陷区域检测,具体的操作流程如图3所示。
作-评价)粗配准算法找到两部分点云之中的对应 即,在点云配准完成后,分别计算不同数据点之间的
点。其中,点云数据集中目标点云的搜索主要是计 间距,以此来确定桥梁结构表面是否存在缺陷。若
间距计算结果大于阈值,可以判断该点属于缺陷点,
算不同点之间的刚性变换矩阵,通过Huber函数描
述距离误差和,以此描述配准误差,即 需要记录到缺陷点云集合中。根据缺陷点云集合,
即可检测出桥梁结构复杂缺陷区域。
1 l 2 , l ≤ φ 1.4 获取桥梁结构缺陷形态识别结果
Hl ε 2 ε ε (5)
( ) =
1 φ (2 l - ), l >φ 为了进一步确定桥梁结构复杂缺陷类别和状
φ
2 ε ε 态,在缺陷检测完成后进一步分析点云数据,提取桥
式中:H(l )为Huber 函数;ε 为对应点对组编号; 梁结构缺陷区域的形变特征,识别出具体的缺陷形
ε
56
2024 年 第 46 卷 第 6 期
无损检测