
Page 95 - 无损检测2024年第六期
P. 95
李沛东 :
基于点云数据实时配准算法的桥梁结构复杂缺陷形态识别
式中: θ 为斜率;∆L为桥梁结构点云数据划分子区域
的长度;s为子区域编号; σ 为子区域桥梁应变;h 为
s s
子区域桥梁结构长度。
最终,将缺陷区域内测量点处的结构位移函数
表示为
h
h
μ () = ∫ h tan ()eh +μ s−
θ
s h − 1 1 (13)
h
h σ () h
∫ eh tanθ 1 ∫ eh +μ
= + s − s − 1
s h − 1 s h − 1 Φ
式中: μ 为测量点处结构位移函数;μ 为子区域结构
s
位移函数。
可基于式(13)计算结果,判断当前桥梁结构复
杂缺陷形态,最终识别出结构缺陷类型。
2 检测试验
2.1 点云数据采集
以独塔自锚式悬索桥为研究对象,将所提识别
方法应用到该桥梁上,识别桥梁结构的缺陷形态,
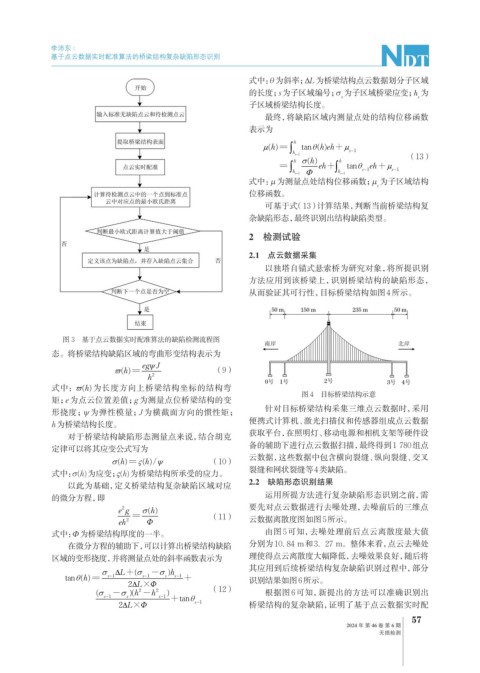
从而验证其可行性,目标桥梁结构如图4所示。
图 3 基于点云数据实时配准算法的缺陷检测流程图
态。将桥梁结构缺陷区域的弯曲形变结构表示为
eg J
ψ
h
ϖ ( )= (9)
h 2
式中: ()hϖ 为长度方向上桥梁结构坐标的结构弯
图 4 目标桥梁结构示意
矩;e 为点云位置差值;g 为测量点位桥梁结构的变
针对目标桥梁结构采集三维点云数据时,采用
形挠度; ψ 为弹性模量;J 为横截面方向的惯性矩;
h为桥梁结构长度。 便携式计算机、激光扫描仪和传感器组成点云数据
获取平台,在照明灯、移动电源和相机支架等硬件设
对于桥梁结构缺陷形态测量点来说,结合胡克
备的辅助下进行点云数据扫描,最终得到1 780组点
定律可以将其应变公式写为
h
σ () = ()/ ψ (10) 云数据,这些数据中包含横向裂缝、纵向裂缝、交叉
h
ς
裂缝和网状裂缝等4类缺陷。
式中: σ(h)为应变;ς(h)为桥梁结构所承受的应力。
2.2 缺陷形态识别结果
以此为基础,定义桥梁结构复杂缺陷区域对应
的微分方程,即 运用所提方法进行复杂缺陷形态识别之前,需
eg σ () 要先对点云数据进行去噪处理,去噪前后的三维点
h
2
eh 2 = Φ (11) 云数据离散度图如图5所示。
式中: Φ 为桥梁结构厚度的一半。 由图5可知,去噪处理前后点云离散度最大值
在微分方程的辅助下,可以计算出桥梁结构缺陷 分别为10. 84 m和3. 27 m。整体来看,点云去噪处
区域的变形挠度,并将测量点处的斜率函数表示为 理使得点云离散度大幅降低,去噪效果良好,随后将
σ L +( σ ∆ - σ )h 其应用到后续桥梁结构复杂缺陷识别过程中,部分
h
θ
tan ( ) = s − 1 s − 1 s s − 1 + 识别结果如图6所示。
2 × L ∆ Φ (12)
( σ s − 1 - σ s )(h 2 -h 2 s − 1 ) +tanθ 根据图6可知,新提出的方法可以准确识别出
2 × L ∆ Φ s− 1 桥梁结构的复杂缺陷,证明了基于点云数据实时配
57
2024 年 第 46 卷 第 6 期
无损检测