
Page 100 - 无损检测2024年第六期
P. 100
蒋志超,等
基于 Mask R-CNN 模型的铁路隧道衬砌机制砂混凝土裂缝视觉检测
v
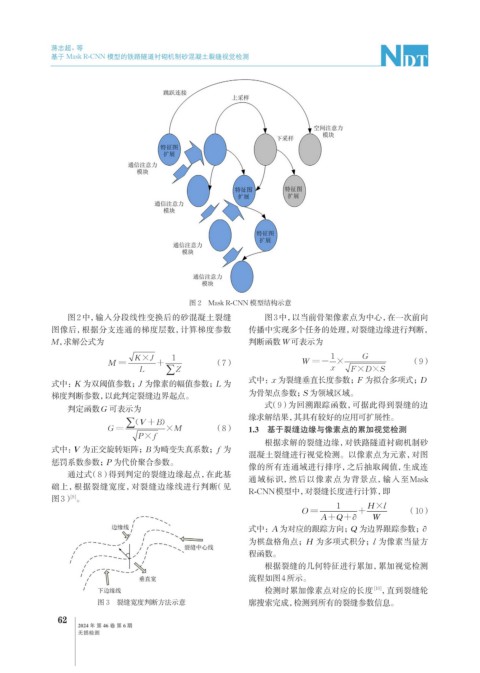
图 2 Mask R-CNN 模型结构示意
图2中,输入分段线性变换后的砂混凝土裂缝 图3中,以当前骨架像素点为中心,在一次前向
图像后,根据分支连通的梯度层数,计算梯度参数 传播中实现多个任务的处理,对裂缝边缘进行判断,
M,求解公式为 判断函数W可表示为
(7) (9)
式中:x 为裂缝垂直长度参数;F 为拟合多项式;D
式中:K 为双阈值参数;J 为像素的幅值参数;L 为
梯度判断参数,以此判定裂缝边界起点。 为骨架点参数;S 为领域区域。
式(9)为回溯跟踪函数,可据此得到裂缝的边
判定函数G 可表示为
缘求解结果,其具有较好的应用可扩展性。
(8) 1.3 基于裂缝边缘与像素点的累加视觉检测
根据求解的裂缝边缘,对铁路隧道衬砌机制砂
式中: V 为正交旋转矩阵;B 为畸变失真系数;f 为
混凝土裂缝进行视觉检测。以像素点为元素,对图
惩罚系数参数;P 为代价聚合参数。
像的所有连通域进行排序,之后抽取阈值,生成连
通过式(8)得到判定的裂缝边缘起点,在此基
通域标识,然后以像素点为背景点,输入至Mask
础上,根据裂缝宽度,对裂缝边缘线进行判断(见
R-CNN模型中, 对裂缝长度进行计算,即
图 3) 。
[9]
O = 1 + H × l (10)
Q
A ++∂ W
式中:A 为对应的跟踪方向;Q 为边界跟踪参数;∂
为棋盘格角点;H 为多项式积分;l 为像素当量方
程函数。
根据裂缝的几何特征进行累加,累加视觉检测
流程如图4所示。
检测时累加像素点对应的长度 [10] ,直到裂缝轮
图 3 裂缝宽度判断方法示意 廓搜索完成,检测到所有的裂缝参数信息。
62
2024 年 第 46 卷 第 6 期
无损检测