
Page 104 - 无损检测2024年第四期
P. 104
于忠宁,等:
石油储备基地储油罐腐蚀的激光超声检测
表 1 传感器参数 深度越大, 为了能充分了解腐蚀损伤情况, 引入腐蚀
项目 参数 损伤因子 D , 则有
型号 B-135A i =N 2 ^
2
d ( t ) ( 5 )
工作频率 / kHz 10~20 D = ∑
i =N
灵敏度 / mm 0.01 1
, 为数据的选取起止点。
分辨率 / mm 0.001 式中: N 1 N 2
测量范围 / mm 0.1~100
2 腐蚀检测试验
(), 腐蚀
设正常储油罐的 Lamb 波信号为s h t
(), 则存在
储油罐的 Lamb波信号为s d t 2.1 试验对象及过程
()
()
s d t = s h t +d ( t ) ( 1 ) 为模拟储油罐的腐蚀检测, 选择与储油罐材料
式中: d ( t ) 为储油罐腐蚀处的 Lamb波散射信号。 相同的一块钢板, 采用电化学腐蚀方法在钢板上腐
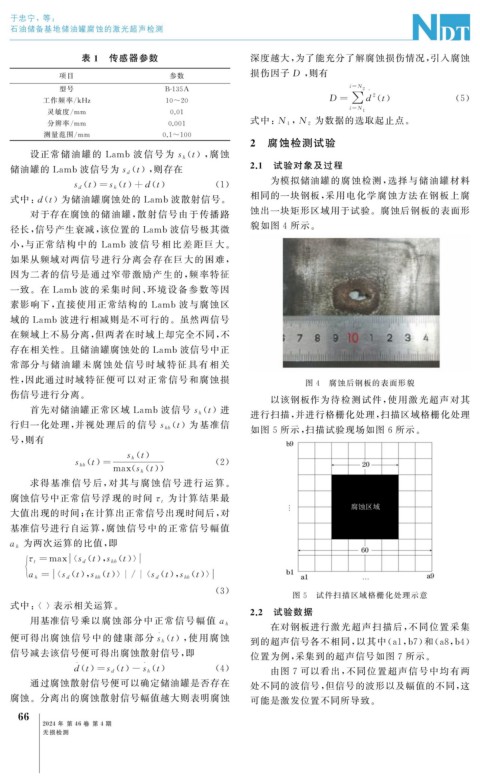
对于存在腐蚀的储油罐, 散射信号由于传播路 蚀出一块矩形区域用于试验。腐蚀后钢板的表面形
径长, 信号产生衰减, 该位置的 Lamb波信号极其微 貌如图 4 所示。
小, 与正常结 构中的 Lamb 波 信 号 相 比 差 距 巨 大。
如果从频域对两信号进行分离会存在巨大的困难,
因为二者的信号是通过窄带激励产生的, 频率特征
一致。在 Lamb波的采集时间、 环境设备参数等因
素影响下, 直接使用正常结构的 Lamb 波与腐蚀区
域的 Lamb波进行相减则是不可行的。虽然两信号
在频域上不易分离, 但两者在时域上却完全不同, 不
存在相关性。且储油罐腐蚀处的 Lamb波信号中正
常部分与储油罐未腐蚀处信号时域特征具 有相关
性, 因此通过时域特征便可以对正常信号和腐蚀损 图 4 腐蚀后钢板的表面形貌
伤信号进行分离。
以该钢板作为待检测试件, 使用激光超声对其
()
首先对储油罐正常区域 Lamb 波信号s h t 进
进行扫描, 并进行格栅化处理, 扫描区域格栅化处理
()
行归一化处理, 并视处理后的信号s hb t 为基准信
如图 5 所示, 扫描试验现场如图 6 所示。
号, 则有
()
s h t
()
s hb t = ( 2 )
())
max ( s h t
求得基准信号后, 对其与腐 蚀信号进行运算。
为计算结果最
腐蚀信号中正常信号浮现的时间τ t
大值出现的时间; 在计算出正常信号出现时间后, 对
基准信号进行自运算, 腐蚀信号中的正常信号幅值
为两次运算的比值, 即
a h
(), ()>
τ t =max < s d t s hb t
< (), ()> / < (), ()>
a h = s d t s hb t | | s d t s hb t
( 3 )
图 5 试件扫描区域格栅化处理示意
式中:<> 表示相关运算。
2.2 试验数据
在对钢板进行激光超声扫描后, 不同位置采集
用基准信号乘以腐蚀部分中正常信号幅值 a h
(), 使用腐蚀
^
便可得出腐蚀信号中的健康部分s h t 到的超声信号各不相同, 以其中( a1 , b7 ) 和( a8 , b4 )
信号减去该信号便可得出腐蚀散射信号, 即 位置为例, 采集到的超声信号如图 7 所示。
^ ^
()
()
d ( t ) s d t - s h t ( 4 ) 由图 7 可以看出, 不同位置超声信号中均有两
=
通过腐蚀散射信号便可以确定储油罐是否存在 处不同的波信号, 但信号的波形以及幅值的不同, 这
腐蚀。分离出的腐蚀散射信号幅值越大则表明腐蚀 可能是激发位置不同所导致。
6
6
2024 年 第 46 卷 第 4 期
无损检测