
Page 71 - 无损检测2022年第十期
P. 71
乔俊明:
大坝心墙河床段基座混凝土裂缝的远程红外监测
为热像仪目标可 视 面 积; d 为 测 量 距 离; 2 , 分别为像素点横坐标方差与纵坐标方
2
式中: A 0 坐标; σ X σ Y
为大气发射率。 , ) 为缺陷连续位
τ aλ 为大气光谱透射率; L bλ 差; m 为缺陷像素点的个数;( X 0 Y 0
经过处理后, 获得被测表面的真实温度 [ 10 ] , 在 置的中心坐标。
此基础上, 根据缺陷区域温度与正常区域温度差划 经上述过程计算出区域中心坐标, 达到识别和
分缺陷的等级, 即 探测裂缝的目的。
ΔT = T 1 -T 2 ×100% ( 8 ) 2 工程实例分析
为缺陷区域的最高或者最
式中: T 1 为平均温度; T 2
低温度。 为验证提出的混凝土裂缝远程红外监测方法的
上述过程可判断检测过的部分是否出现故障, 有效性, 笔者进行了验证试验与工程实例分析。
但是不能深入表明其他问题, 还需进一步处理。 2.1 验证试验
1.4 监测后处理 制作试验用混凝土试件, 试件的强度为 C30 , 混
经过红外检测后, 采用傅里叶变换与 K-means 凝土材料中水泥、 砂、 石、 水的配比为500∶512∶1150∶
聚类结合的方法处理红外热图, 二维傅里叶变换原 200 。
理是在一维傅里叶变换的基础上添加位置信息 [ 11 ] , 生产混凝土所用的水泥是普通的硅酸盐水泥,
即 中砂材料为河砂, 碎石粉材料为石灰石。
b 确定配比后, 浇筑试件, 过程如下。
F ( k ) =D ( T ( n )) * ∑ T ( n ) ( 9 )
n= 0 ( 1 )将制作时需要的砂、 石、 水泥按照设计好的
式中: * 为傅里叶计算模式; T ( n ) 为第n 个采样序 配合比放入到搅拌机中。
列的采样频率; D 为图像序列长度; F ( k ) 为位置信 ( 2 )拌和材料, 在搅拌过程中不断添加水, 水添
息; b 为势垒高度。 加完成后停止浇筑。
时, 将振
当热图序列长度为 N , 采样频率为 f s ( 3 )清理模具的内壁, 清理干净后将混凝土浆
幅与相位关系 [ 12 ] 表示为 注入到模具中。
Im [ F ( k )] ( 4 )压实混凝土浆, 排出其中的气泡, 并用抹铲
(
=
φ k ) arctan ( 10 ) 抹平表面, 共制备 8 个试件。
R [ F ( k )]
式中: Im [ F ( k )] 为 快速 傅 里 叶 变 换 的 虚 部; R [ F ( 5 )静置 24h 后拆模, 获得试件。
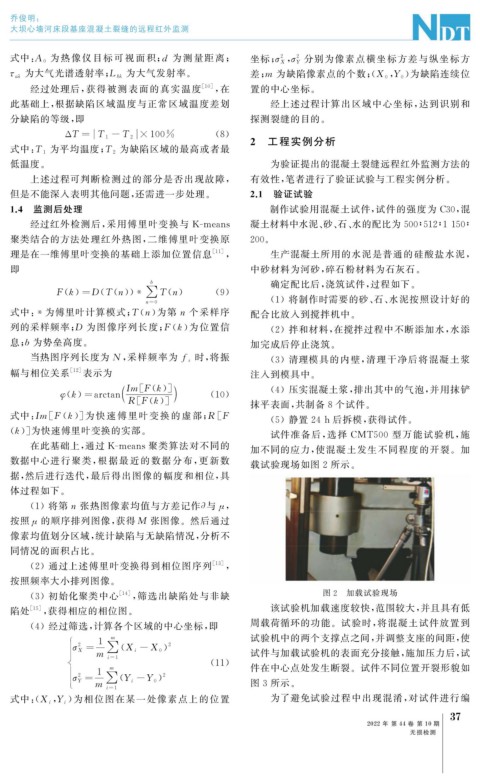
( k )] 为快速傅里叶变换的实部。 试件准备后, 选择 CMT500 型万能试验机, 施
在此基础上, 通过 K-means聚类算法对不同的 加不同的应力, 使混凝土发生不同程度的开裂。加
数据中心进行聚类, 根据最近的数据分 布, 更新数 载试验现场如图 2 所示。
据, 然后进行迭代, 最后得出图像的幅度和相位, 具
体过程如下。
( 1 )将第n 张热图像素均值与方差记作 ∂ 与 μ ,
按照 μ 的顺序排列图像, 获得 M 张图像。然后通过
像素均值划分区域, 统计缺陷与无缺陷情况, 分析不
同情况的面积占比。
[ 13 ]
( 2 )通过上述傅里叶变换得到相位图序列 ,
按照频率大小排列图像。
( 3 )初始化聚类中心 [ 14 ] , 筛选出缺陷处与非缺 图 2 加载试验现场
陷处 [ 15 ] , 获得相应的相位图。 该试验机加载速度较快, 范围较大, 并且具有低
( 4 )经过筛选, 计算各个区域的中心坐标, 即 周载荷循环的功能。试验时, 将混凝土试件放置到
m 试验机中的两个支撑点之间, 并调整支座的间距, 使
2 1 2
σ X = ∑ ( X i -X 0 ) 试件与加载试验机的表面充分接触, 施加压力后, 试
m i = 1
m ( 11 ) 件在中心点处发生断裂。试件不同位置开裂形貌如
1
2
2
σ Y = ∑ ( Y i -Y 0 ) 图 3 所示。
m i =1
, ) 为相位图在某一处像素点上的位置 为了避免试验过程中出现混淆, 对试件进行编
式中:( X i Y i
7
3
2022 年 第 44 卷 第 10 期
无损检测