
Page 55 - 无损检测2022年第十期
P. 55
邢 述,等:
空间数据扫描技术在大型常压储罐变形检测中的应用
较高、 操作便捷高效, 借助超高采样率实现储罐结构
点云数据采集, 经数据处理可直接形成储罐整体结
构及附属设施的网格化模型, 通过标准圆柱体拟合、
特征线提取、 断层切片等操作, 实现任意位置、 截面、
角度的变形测量及比对分析, 最终完成储罐结构变
形、 不圆度、 垂直度、 基础沉降等结构完整性评价。
1 空间数据扫描技术
空间数据扫描技术通常采用三维激光 扫描系
统, 通过发射、 接收被检表面反射的激光行程、 时间
或波长相位差计算得出扫描点的球坐标; 配合反射
棱镜、 补偿器等部件在三维空间内做周向和轴向的
旋转扫描, 记录整个空间有效距 离内的点云数据。
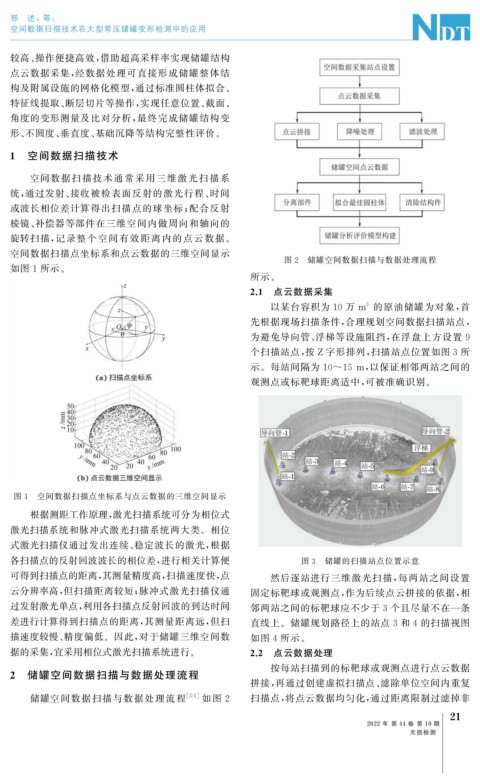
空间数据扫描点坐标系和点云数据的三维空间显示
图 2 储罐空间数据扫描与数据处理流程
如图 1 所示。
所示。
2.1 点云数据采集
以某台容积为 10 万 m 的原油储罐为对象, 首
3
先根据现场扫描条件, 合理规划空间数据扫描站点,
为避免导向管、 浮梯等设施阻挡, 在浮盘上方设置 9
个扫描站点, 按 Z 字形排列, 扫描站点位置如图3 所
示。每站间隔为 10~15m , 以保证相邻两站之间的
观测点或标靶球距离适中, 可被准确识别。
图 1 空间数据扫描点坐标系与点云数据的三维空间显示
根据测距工作原理, 激光扫描系统可分为相位式
激光扫描系统和脉冲式激光扫描系统两大类。相位
式激光扫描仪通过发出连续、 稳定波长的激光, 根据
各扫描点的反射回波波长的相位差, 进行相关计算便 图 3 储罐的扫描站点位置示意
可得到扫描点的距离, 其测量精度高, 扫描速度快, 点 然后逐站进行三维激光扫描, 每两站之间设置
云分辨率高, 但扫描距离较短; 脉冲式激光扫描仪通 固定标靶球或观测点, 作为后续点云拼接的依据, 相
过发射激光单点, 利用各扫描点反射回波的到达时间 邻两站之间的标靶球应不少于 3 个且尽量不在一条
差进行计算得到扫描点的距离, 其测量距离远, 但扫 直线上。储罐规划路径上的站点 3 和 4 的扫描视图
描速度较慢、 精度偏低。因此, 对于储罐三维空间数 如图 4 所示。
据的采集, 宜采用相位式激光扫描系统进行。 2.2 点云数据处理
按每站扫描到的标靶球或观测点进行点云数据
2 储罐空间数据扫描与数据处理流程
拼接, 再通过创建虚拟扫描点、 滤除单位空间内重复
储罐空间数据扫描与数据处理流程 [ 3-5 ] 如图 2 扫描点, 将点云数据均匀化, 通过距离限制过滤掉非
1
2
2022 年 第 44 卷 第 10 期
无损检测