
Page 45 - 无损检测2022年第八期
P. 45
韩 超,等:
一种粉末材料夹杂物的新型数字射线检测方法
和旋转不变性问题。方向信息是通过计算特征点的
梯度 得 到 的, 对 于 任 一 特 征 点 其 梯 度 幅 值 信 息
m ( x , ) 和方向信息θ ( x , ) 可以描述为
y
y
y -L ( x -1 , )]
m ( x , ) {[ L ( x +1 , ) y 2 +
y =
y+1 )
[ L ( x , -L ( x , 2 1 / 2 ( 4 )
y-1 )]}
y-1 )
y+1 )
L ( x , -L ( x ,
y =
θ ( x , ) arctan
y -L ( x -1 , )
L ( x +1 , ) y
( 5 )
式中: L ( x , ) 为尺度图像。
y
( 3 )计算特征点的描述子
为了保证特征矢量具有旋转不变性, 需要以关
键点为中心将原图像旋转至与主方向相同。此外还
需要为关键点建立一个描述子向量, 使其在不同光
线与视角下皆能保持不变性, 并且能够与其他关键
点区分开 [ 7 ] 。描述子构造过程如图 3 所示, 关键点
位于左图的窗口中间, 其余小格代表邻域范围内像
素, 首先计算邻域内所有像素的梯度信息并使用高
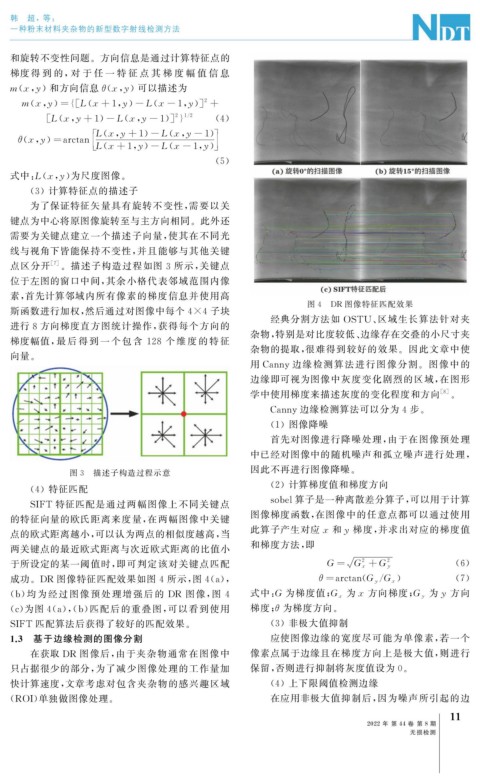
图 4 DR 图像特征匹配效果
斯函数进行加权, 然后通过对图像中每个 4×4 子块
经典分割方法如 OSTU 、 区域生长算法针对夹
进行 8 方向梯度直方图统计操作, 获得每个方向的
杂物, 特别是对比度较低、 边缘存在交叠的小尺寸夹
梯度幅值, 最 后 得 到 一 个 包 含 128 个 维 度 的 特 征
杂物的提取, 很难得到较好的效果。因此文章中使
向量。
用 Cann y 边缘检测算法进行图像分割。图像中的
边缘即可视为图像中灰度变化剧烈的区域, 在图形
学中使用梯度来描述灰度的变化程度和方向 [ 8 ] 。
Cann y 边缘检测算法可以分为 4 步。
( 1 )图像降噪
首先对图像进行降噪处理, 由于在图像预处理
中已经对图像中的随机噪声和孤立噪声进行处理,
图 3 描述子构造过程示意 因此不再进行图像降噪。
( 2 )计算梯度值和梯度方向
( 4 )特征匹配
SIFT 特征匹配是通过两幅图像上不同关键点 sobel算子是一种离散差分算子, 可以用于计算
图像梯度函数, 在图像中的任意点都可以通过使用
的特征向量的欧氏距离来度量, 在两幅图像中关键
点的欧式距离越小, 可以认为两点的相似度越高, 当 此算子产生对应x 和 y 梯度, 并求出对应的梯度值
和梯度方法, 即
两关键点的最近欧式距离与次近欧式距离的比值小
于所设定的某一阈值时, 即可判定该对关键点匹配 G = G x +G y ( 6 )
2
2
/
成功。 DR 图像特征匹配效果如图 4 所示, 图 4 ( a ), θ= arctan ( G y G x ) ( 7 )
为 y 方向
( b ) 均为经 过图像预处理增强后的 DR 图像, 图 4 式中: G 为梯度值; G x 为x 方向梯度; G y
( c ) 为图 4 ( a ),( b ) 匹配后的重叠图, 可以看到使用 梯度; θ 为梯度方向。
SIFT 匹配算法后获得了较好的匹配效果。 ( 3 )非极大值抑制
1.3 基于边缘检测的图像分割 应使图像边缘的宽度尽可能为单像素, 若一个
在获取 DR 图像后, 由于夹杂物通常在图像中 像素点属于边缘且在梯度方向上是极大值, 则进行
只占据很少的部分, 为了减少图像处理的工作量加 保留, 否则进行抑制将灰度值设为 0 。
快计算速度, 文章考虑对包含夹杂物的感兴趣区域 ( 4 )上下限阈值检测边缘
( ROI ) 单独做图像处理。 在应用非极大值抑制后, 因为噪声所引起的边
1
1
2022 年 第 44 卷 第 8 期
无损检测